技术特征:
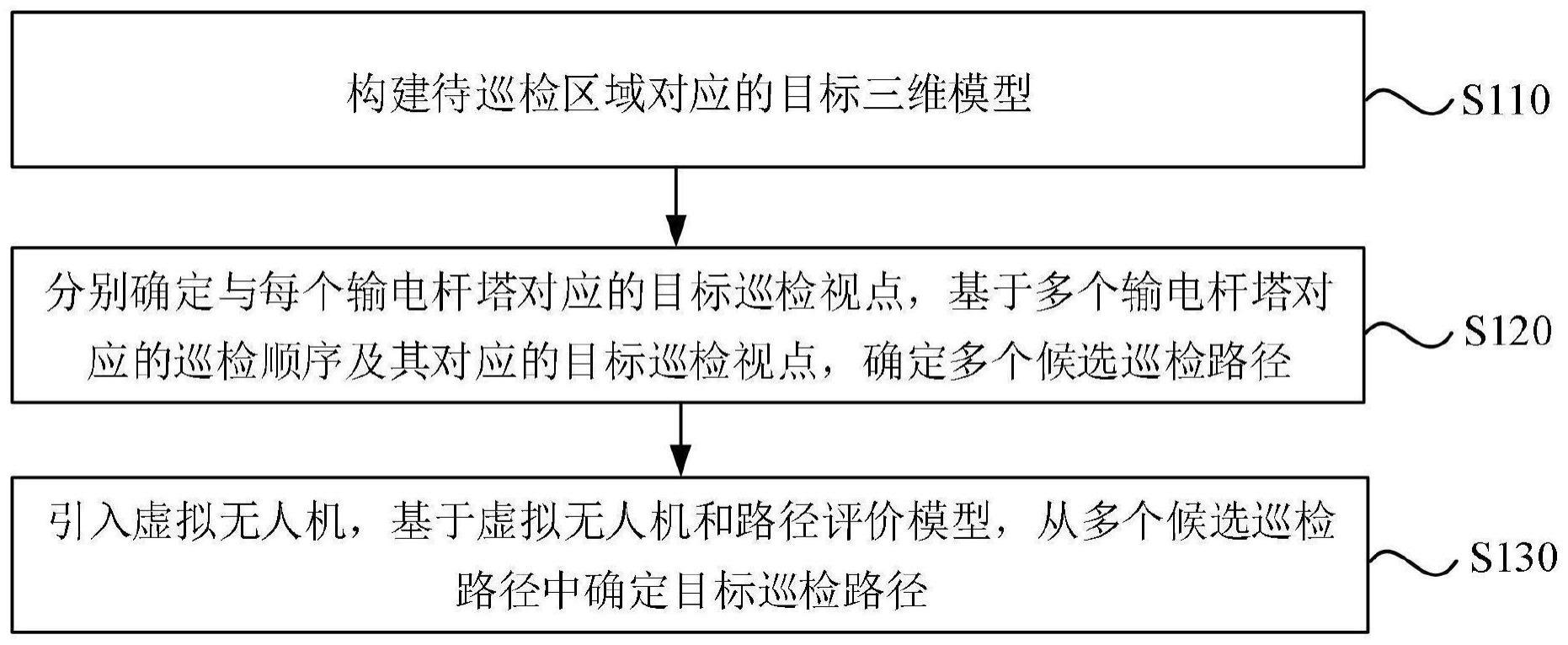
1.一种输电线路巡检的路径规划方法,其特征在于,包括:构建待巡检区域对应的目标三维模型;其中,所述目标三维模型中包含多个输电杆塔以及所述多个输电杆塔之间的输电线路;分别确定与每个所述输电杆塔对应的目标巡检视点,基于多个所述输电杆塔对应的巡检顺序及其对应的所述目标巡检视点,确定多个候选巡检路径;引入虚拟无人机,基于所述虚拟无人机和路径评价模型,从所述多个候选巡检路径中确定目标巡检路径。2.根据权利要求1所述的方法,其特征在于,所述分别确定与每个所述输电杆塔对应的目标巡检视点,包括:针对每个所述输电杆塔,将所述目标三维模型中所述输电杆塔对应的三维结构体划分为多个空间子区域,并为每个所述空间子区域赋予标签信息,得到与所述输电杆塔对应的多个语义模型块,其中,所述标签信息包括区域标识以及区域的空间坐标范围,所述区域标识为杆塔顶部标识、横担标识、杆塔底部标识或绝缘子标识;基于预设安全巡查距离,构建与所述每个输电杆塔对应的安全包围空间;基于所述多个语义模型块和所述安全包围空间,确定所述输电杆塔对应的多个待选巡检视点;基于预先构建的与所述输电杆塔对应的视点评价函数和所述输电杆塔对应的多个待选巡检视点,确定与所述输电杆塔对应的目标巡检视点。3.根据权利要求2所述的方法,其特征在于,所述目标三维模型以三角形面片为基本元素,所述安全包围空间包括圆柱体安全空间或长方体安全空间,所述基于所述多个语义模型块和所述安全包围空间,确定所述每个输电杆塔对应的多个待选巡检视点,包括:在所述圆柱体安全空间上构建与每个语义模型块对应的第一候选视点区域,将所述第一候选视点区域中的预设数量的离散点确定为该输电杆塔对应的多个待选巡检视点;或者,在所述长方体安全空间上构建与每个语义模型块对应的第二候选视点区域,将所述第二候选视点区域中的预设数量的离散点确定为该输电杆塔对应的多个待选巡检视点。4.根据权利要求3所述的方法,其特征在于,所述在所述圆柱体安全空间上构建与每个语义模型块对应的第一候选视点区域,所述第一候选视点区域表达式为:语义模型块对应的第一候选视点区域,所述第一候选视点区域表达式为:
其中,g(x,y,z)为当前语义模型块对应的候选视点区域,r为圆柱体安全空间的半径,z
min
和z
max
分别为当前语义模型块中三角形面片顶点坐标中的最小值和最大值;(o
x
,o
y
)为将当前输电杆塔及当前输电杆塔对应的圆柱体安全空间投影到xoy平面上,圆柱体安全空间的中心轴投影坐标,(c
xt
,c
yz
)为第i个三角形面片xoy平面上的中心投影坐标。5.根据权利要求3所述的方法,其特征在于,所述在所述长方体安全空间上构建与每个语义模型块对应的第二候选视点区域,所述第二候选视点区域表达式为:其中,h(x,y,z)为当前语义模型块对应的候选视点区域,a为长方体安全空间的长度,b为长方体安全空间的宽度,z
min
和z
max
分别为当前语义模型块中三角形面片顶点坐标中的最小值和最大值。6.根据权利要求2所述的方法,其特征在于,在所述基于预先构建的与所述输电杆塔对应的视点评价函数和所述输电杆塔对应的多个待选巡检视点,确定与所述输电杆塔对应的目标巡检视点之前,还包括:基于与所述输电杆塔对应的每个语义模型块中的多个三角形面片对应的视点熵,确定所述每个语义模型块对应的观测信息量;基于每个语义模型块中的多个三角形面片对应的视点相对熵,确定所述每个语义模型块对应的观测信息质量;基于每个语义模型块中的可见面片数量,确定所述每个语义模型块对应的信息可见度;基于所述每个语义模型块对应的观测信息量、观测信息质量以及所述信息可见度,构建每个输电杆塔对应的视点评价函数。7.根据权利要求1所述的方法,其特征在于,所述基于所述虚拟无人机和路径评价模型,从所述多个候选巡检路径中确定目标巡检路径,包括:当所述虚拟无人机基于每个候选巡检路径运行时,基于路径评价模型,确定每个所述候选巡检路径对应的奖励得分值;基于所述奖励得分值,从所述多个候选巡检路径中确定目标巡检路径。8.根据权利要求1所述的方法,其特征在于,所述路径评价模型包括飞行动作确定模块、飞行状态确定模块和奖励值确定模块;所述基于路径评价模型,确定每个所述候选巡检路径对应的奖励得分值,包括:当所述虚拟无人机基于当前候选巡检路径运行时,基于所述飞行动作确定模块,确定所述虚拟无人机运行的过程中的多个飞行动作值;基于所述飞行状态确定模块,确定与所述多个飞行动作值相对应的多个虚拟无人机状态序列;
基于所述奖励值确定模块,确定与所述多个飞行动作值相对应的奖励值;其中,所述奖励值的影响因子包括:动作奖励、通信奖励、完成节点任务奖励、消极动作奖励以及完成最终任务奖励中的至少一项,所述通信奖励是基于所述虚拟无人机状态序列确定的;基于所述奖励值确定当前候选巡检路径的奖励得分值。9.一种输电线路巡检的路径规划装置,其特征在于,包括:三维模型构建模块,用于构建待巡检区域对应的目标三维模型;其中,所述目标三维模型中包含多个输电杆塔以及所述多个输电杆塔之间的输电线路;候选路径确定模块,用于分别确定与每个所述输电杆塔对应的目标巡检视点,基于多个所述输电杆塔对应的巡检顺序及其对应的所述目标巡检视点,确定多个候选巡检路径;目标路径确定模块,用于引入虚拟无人机,基于所述虚拟无人机和路径评价模型,从所述多个候选巡检路径中确定目标巡检路径。10.一种电子设备,其特征在于,所述电子设备包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-8中任一项所述的一种输电线路巡检的路径规划方法。
技术总结
本发明公开了一种输电线路巡检的路径规划方法、装置及介质。构建待巡检区域对应的目标三维模型;其中,目标三维模型中包含多个输电杆塔以及多个输电杆塔之间的输电线路;分别确定与每个输电杆塔对应的目标巡检视点,基于多个输电杆塔对应的巡检顺序及其对应的目标巡检视点,确定多个候选巡检路径;引入虚拟无人机,基于虚拟无人机和路径评价模型,从多个候选巡检路径中确定目标巡检路径,本发明解决了无人机在巡检输电线路时效率低的问题,确定了覆盖面广且目标检测率高的巡检路线,提高了输电线路巡检的效率。输电线路巡检的效率。输电线路巡检的效率。
技术研发人员:朱红涛 万宇宏 苏超 陈建华 龚翔 卢伯添
受保护的技术使用者:广东电网有限责任公司清远供电局
技术研发日:2023.07.19
技术公布日:2023/10/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。