技术特征:
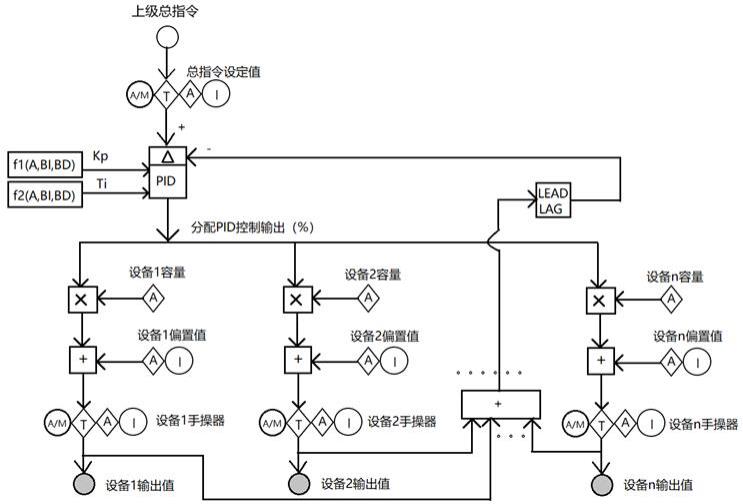
1.基于虚拟测量的pid闭环快速分配控制方法,其特征在于,包括如下步骤:步骤(1),接受传来的上级总指令作为分配pid的设定值,被控量pv
z
是分配各设备输出值的总和经滤波的终值,自适应分配pid的比例增益k
p
和积分时间t
i
值是各设备投入自动状态a、闭锁增状态bi、闭锁减状态bd的集合的计算函数值;dev=pv
z-s
z
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)式(1)中,dev为分配pid的偏差输入,pv
z
为分配各设备输出值的总和经滤波的终值,s
z
为分配pid的设定值;t
i
=f2(a,bi,bd)=t
i0
/k
p
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)式(2)和式(3)中,f1(a,bi,bd)是各设备投入自动状态a、闭锁增状态bi、闭锁减状态bd的集合的计算函数值;f2(a,bi,bd)是各设备投入自动状态a、闭锁增状态bi、闭锁减状态bd的集合的计算函数值;k
p0
是自适应pid的比例参数初始设定值,t
i0
是自适应pid的积分参数初始设定值;通过pid运算的分配控制,以dev=0为目标,进行迭代分配,直至分配各设备输出值的总和经滤波的终值与分配pid的设定值一致,保证了测量值pv
z
快速一致响应分配pid的设定值s
z
;z
i
是分配设备i的容量;z
t
是分配设备的总容量,是z
i
的总和;a
i
是分配设备i参与自动分配的状态;not(bi
i
)是分配设备i的未闭锁增的状态,not(bd
i
)是分配设备i的未闭锁减的状态,&是逻辑“与”运算;n为设备的总数量;步骤(2),计算分配各设备输出值的总和经滤波的终值作为虚拟测量的被控量,计算如下:式(4)中,leadlag是滤波模块,o
i
是设备i的控制输出值;步骤(3),计算设备i的控制输出值,计算如下:o
i
=o
pid
·
z
i
b
i
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)式(3)中,o
pid
是分配pid的控制输出值,b
i
是人工设定偏置值;步骤(4),在个体设备闭锁增时,若分配pid指令继续增时,闭锁增的设备将保持输出值,按照分配算法有能力增的设备按容量比值分配不断增加,直到分配各设备输出值的总和经滤波的终值与分配pid的设定值一致;在个体设备闭锁减时,若分配pid指令继续减时,按照分配算法有能力减的设备按容量比值分配不断减少,闭锁减的设备将保持输出值,直到分配各设备输出值的总和经滤波的终值与分配pid的设定值一致。2.根据权利要求1所述的基于虚拟测量的pid闭环快速分配控制方法,其特征在于,a
i
是分配设备i参与自动分配的状态,其中状态为是否参与自动分配,参与自动分配时,a
i
为0;不参与自动分配时,a
i
为1。3.根据权利要求1所述的基于虚拟测量的pid闭环快速分配控制方法,其特征在于,not(bi
i
)是分配设备i的未闭锁增的状态,外部条件赋予的闭锁增条件存在,bi
i
为1,外部条件赋予的闭锁增条件不存在,bi
i
为0。
4.根据权利要求1所述的基于虚拟测量的pid闭环快速分配控制方法,其特征在于,not(bd
i
)是分配设备i的未闭锁减的状态,外部条件赋予的闭锁减条件存在,bi
i
为1,外部条件赋予的闭锁减条件不存在,bi
i
为0。
技术总结
本发明涉及一种基于虚拟测量的PID闭环快速分配控制方法,属于自动控制技术领域。该方法为:接受传来的上级总指令作为分配PID的设定值,被控量是分配各设备输出值的总和经滤波的终值,自适应分配PID的比例增益K
技术研发人员:刘友宽 宋小龙 伍阳阳 文天舒 袁华宇
受保护的技术使用者:云南电力试验研究院(集团)有限公司
技术研发日:2023.06.30
技术公布日:2023/9/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。