技术特征:
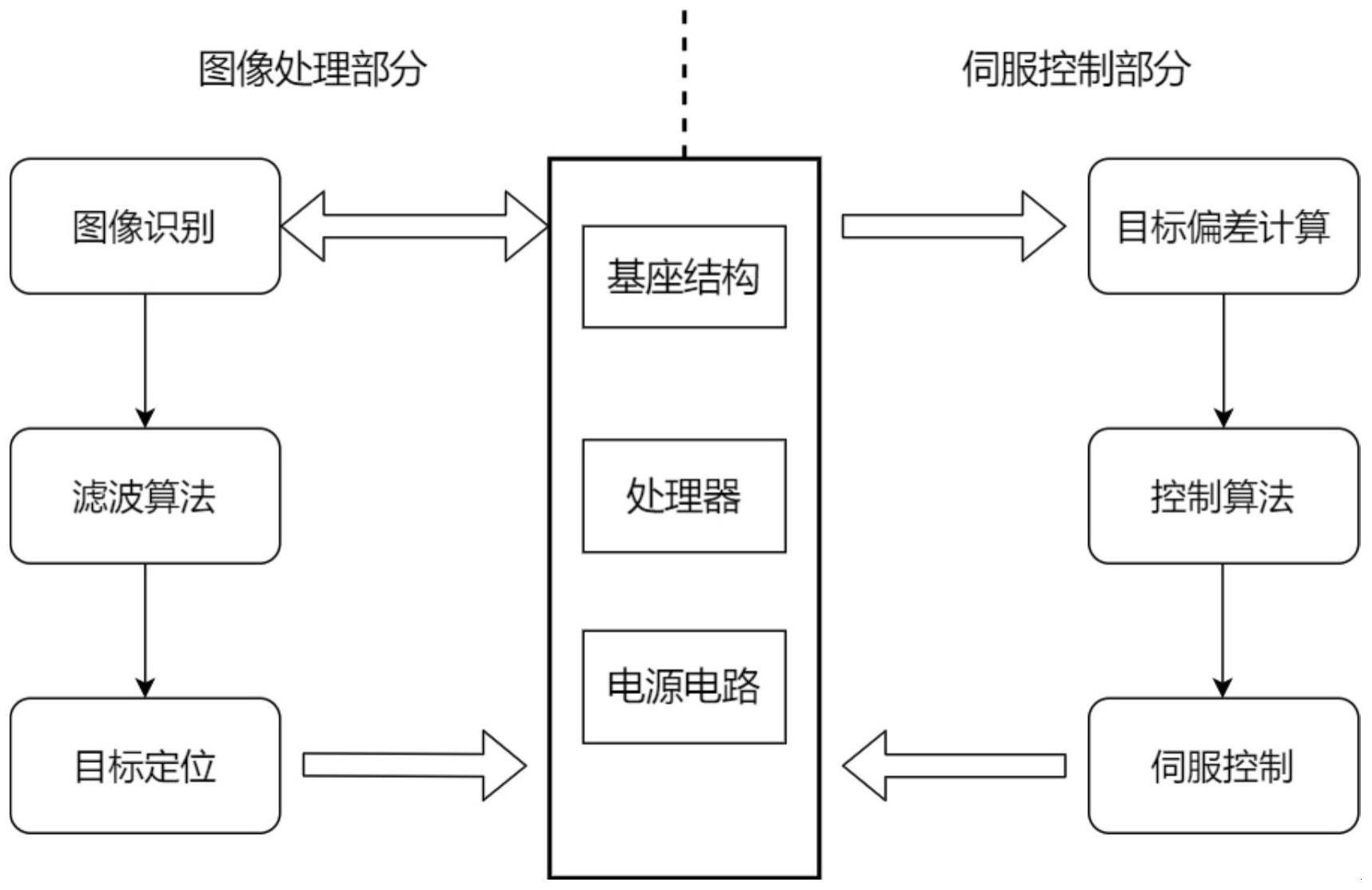
1.一种基于模糊pid控制的平衡球控制系统,该控制系统包括:基座结构模块、电源与电路模块、控制系统处理器模块、伺服控制模块、图像处理模块;所述基座结构模块、电源与电路模块以及控制系统处理器模块为整个控制系统的基座部分,所述伺服控制模块、图像处理模块为控制系统的算法部分,图像处理模块负责图像识别、图像预处理以及目标定位;伺服控制部分则根据定位差值,由控制算法对伺服控制机构进行系统运动控制;所述基座结构模块包括:系统基座、运动板面、中央支撑柱、两个舵机、两根支撑杆、陀螺仪,所述系统基座和运动板面都是平面结构,基座中心位置固定设置中央支撑柱,中央支撑柱与运动板面中心通过万向节连接;两个舵机设置于系统基座上,与系统基座中心的连线夹角为90度,舵机的输出轴通过连接片与支撑杆的一端铰接,支撑杆的另一端与运动板面通过万向节连接;陀螺仪设置于运动板面下方,实时采集运动面板的角度信息;连杆分为旋转位移部分和垂直提升部分,旋转位移部分连接舵机的输出轴,垂直提升部分的末端连接支撑杆;两个部分的连接配合使得舵机的旋转切向力变为垂直提升力;建立控制系统的数学模型如下:定义系统的初始位置和初始速度,初始角度和速度都为零位,运动过程中只考虑重力以及球体转动力的影响,忽略摩擦力以及其他作用力;球体切向力为:其中,f
r
为平衡球体切向力,i为平衡球的转动惯量,β(t)为平衡球的转动角度,t为时间参数,为平衡球转动角度关于时间参数的二阶导数,r
b
为平衡球半径;再把角度量转换为线性量x(t):x(t)=β(t)
×
r
b
得到切向力关于运动线性位移的表达式:其中,为线性量x(t)关于时间参数的二阶导数,又由牛顿运动定律得:m表示平衡球质量,g为重力系数;得到关于小球的运动微分方程:根据运动板面倾斜角度θ和舵机输出齿轮偏转角度α有:其中,r
a
为伺服齿轮的半径,l为板面长度,得到最终的小球运动微分方程有:
所述图像处理模块的处理方法为:a1:定义:双边滤波的权重系数w(i,j,k,l)的定义域表示为g
s
,值域表示为g
r
;由如下公式:由如下公式:得到图像中像素(i,j)和(k,l)之间的权值w(i,j,k,l),以及邻域内所有像素的权值和k;σ
s
,σ
r
分别表示滤波值参数与空间邻域参数,f(i,j)表示该像素点的值;f(i,j)表示该像素点的值;最后带入双边滤波器公式:其中,g(i,j)表示该像素点经过双边滤波之后的值;a2:目标识别;
①
lab颜色空间识别需要关闭摄像头白平衡和自动增益,设置lab阈值参数,设置颜色最小像素阈值为10,即只判断大于10个像素的颜色值,根据色块像素的密度判定是否识别目标,在算法识别到初步目标之后,提取目标边缘;
②
梯度霍夫圆检测算法是在lab颜色识别之后进行,初步确定目标,且提取出目标边缘之后,利用霍夫变换,对图像边缘像素点进行分析,再通过坐标变换,累计重复点数,从而找到目标圆以及圆心。所述控制系统处理器模块中采用模糊pid控制方法,该方法方法分为:模糊化、数据库、去模糊化与pid计算;b1:模糊化即对系统位置误差e与该误差变化率δe作为pid模糊控制的输入,系统位置误差e表示小球的当前位置坐标值与所设定目标位置之间的差值,根据模糊化数学思想,其绝对值设定在[0,6]区间内连续变化,采用三角形隶属度函数的形式,根据模糊子集的定义,两个参数模糊集合为:|e|=|δe|={nb,nm,ns,zo,ps,pm,pb}其中nb,nm,ns,zo,ps,pm,pb代表负大、负中、负小、零、正小、正中、正大;
b2:结合经验所得的模糊控制关系表,对模糊pid控制系统进行模糊推理,对误差e和误差变化率δe进行模糊映射,根据三角形隶属度函数对四个参数进行两两组合,通过查表法获得控制量输出;b3:到模糊化控制量输出之后,根据模糊集合的定义对输出量进行解模糊计算,得到解模糊计算结果,再根据区间映射公式输出最后的pid参数。
技术总结
本发明涉及一种基于模糊PID控制的平衡球控制系统,采用模块化系统集成,分为基座结构模块、电源与电路模块、控制系统处理器模块、伺服控制模块、图像处理模块。控制系统根据摄像头获取目标信息,经过图像预处理步骤、目标识别与目标定位步骤,获取球体定位信息,根据控制算法处理计算,控制高频伺服舵机进行角度偏转,舵机连杆带动板面呈不同倾斜角度,最终使球体按照预设坐标运动,本发明在传统PID控制技术的基础上,引入模糊控制技术,不需要人工PID调整参数,能够做到参数自适应性调整。与现有技术相比,本系统的发明方法易于实施,适用性广,控制效果表征能力好。控制效果表征能力好。控制效果表征能力好。
技术研发人员:曾钦勇 孙欣 尹小杰 王少敏 赵彦 杨博旭 檀鼎谦
受保护的技术使用者:电子科技大学
技术研发日:2023.06.19
技术公布日:2023/9/7
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。