技术特征:
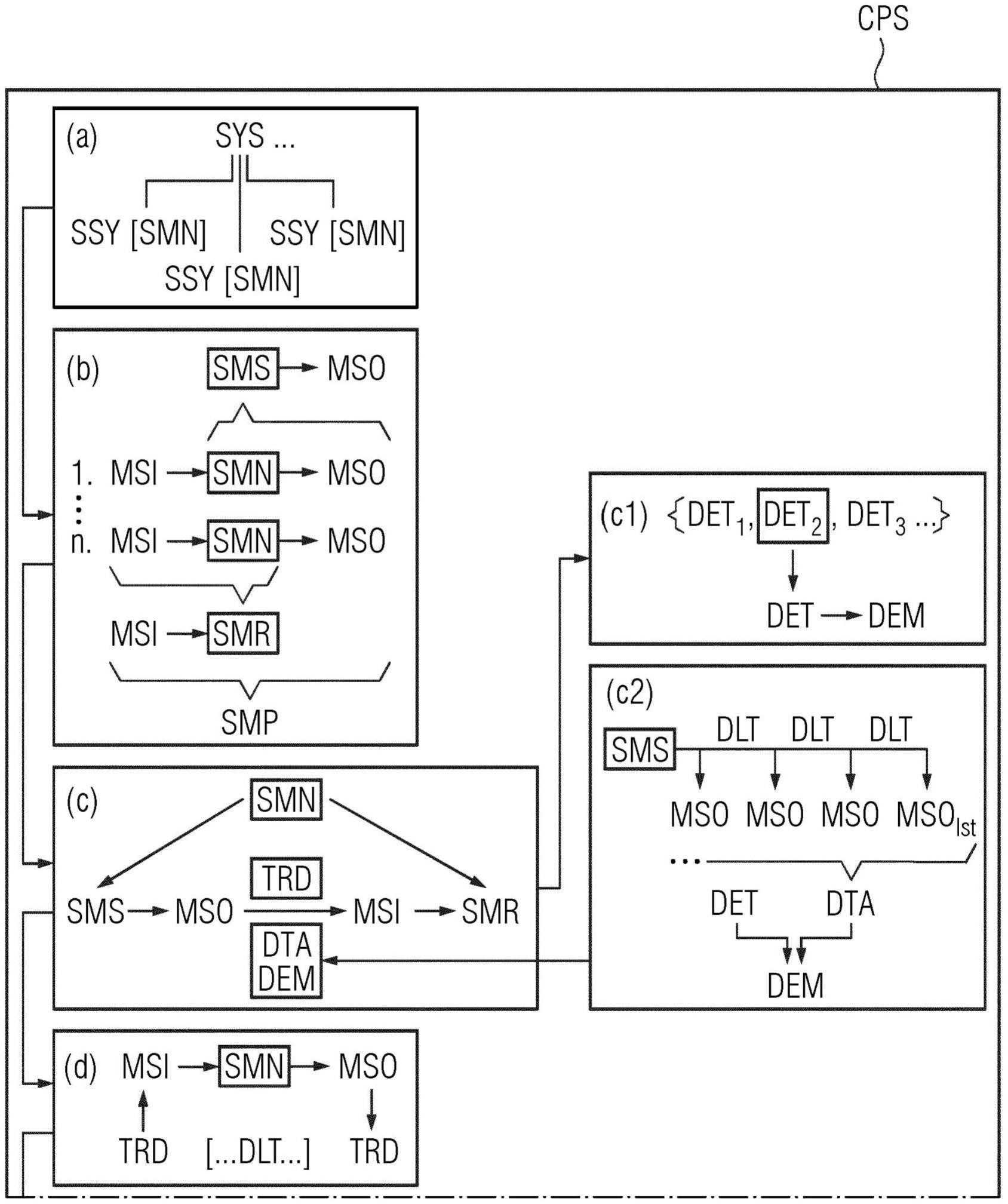
1.一种用于系统(sys)的数字模块化仿真的计算机实现的方法,包括:(a)将所述系统(sys)分解为至少两个子单元(ssy)仿真子系统(smn),(b)在相应的子系统时间步长(smp)期间,逐步重复地仿真相应的子单元(ssy),根据子系统步骤输入(msi)产生子系统步骤输出(mso),其特征在于以下附加步骤:(c)向接收子系统(smr)发送子系统步骤输入(msi),并在生成子系统步骤输出(mso)之前在延迟时间(dlt)上仿真这个子系统(smn),(d)从发送子系统(sms)接收连接接口变量(trd),所述连接接口变量包括以下各项中的至少一项:-数字数据(dta),-至少所述数字数据(dta)的数据预测模型(dem)的参数,-分配给所述数字数据(dta)的数据预测模型(dem),其中,所述数字数据(dta)属于所述发送子系统(sms)的所述子系统步骤输出(mso),包括关于所述发送子系统(sms)的待发送到至少一个接收子系统(smr)的至少一个信息的细节,(e)由数据预测模型(dem)在所述延迟时间(dlt)上预测所述数字数据(dta),以获得由所述发送子系统(sms)提供的所述接口变量(trd)的预测数字数据(edt),(f)开始所述接收子系统(smr)的下一个仿真步骤,根据子系统步骤输入(msi)生成下一个子系统步骤输出(mso),其中,所述子系统步骤输入(msi)包括所述预测数字数据(edt)。2.根据权利要求1所述的方法,包括以下附加步骤:-通过从一组预定函数中选择数据预测模型类型(det)来确定所述数据预测模型(dem),以及-将所述数据预测模型(dem)根据先前的1、2、3或更多步骤的子系统步骤输出(mso)的相应的所述发送子系统(sms)的数字数据(dta)进行校准,不包括最新生成的子系统步骤输出(mso
lst
)。3.根据权利要求2所述的方法,其中,所述数据预测模型(dem)是多项式函数。4.根据权利要求1或2所述的方法,包括以下步骤:在发送子系统(sms)协同仿真步骤(smp)之后选择所述数据预测模型(dem),在对应的发送子系统(sms)的对应步骤上,在接收子系统(smr)预测之前,使用所选择的数据预测模型(dem)根据预先选择的数据预测模型类型(det)来校准所述数据预测模型(dem)。5.根据权利要求3所述的方法,包括以下步骤:在发送子系统(sms)协同仿真步骤(smp)之后选择所述数据预测模型(dem)的多项式次数,在对应的发送子系统(sms)的对应步骤上,在接收子系统(smr)预测之前,使用所选择的多项式次数,根据预先选择的数据预测模型类型(det)来校准所述数据预测模型(dem)。6.根据权利要求3、4或5所述的方法,包括以下附加步骤:-选择所述数据预测模型类型(det)的多项式阶数
‑
通过比较由所述数据预测模型(dem)至少基于在最新子系统步骤输出(mso
1st
)之前的步骤的子系统步骤输出(mso)所计算的数字数据(dta
prd
)与所述发送子系统(sms)的同一时间点(pit)的子系统步骤输出(mso
1st
)的最新数字数据(dta
rel
),确定误差(erd),-重复至少一次以下步骤:-选择多项式阶数,其中,选择与在前重复期间不同的多项式阶数,以及-确定关联的误差(erd),-将所述数据预测模型(dem)的多项式阶数选择为在前重复步骤期间分别选择和误差(erd)确定的所述数据预测模型(dem)中具有最小误差(erd)的一个,-在所述数据预测模型类型的所有多项式阶数产生大于给定阈值(trs)的误差的情况下,使用常量数据预测模型(dem)[0阶]。7.根据权利要求6所述的方法,包括以下附加步骤:-通过埃尔米特插值来扩展所获得的数据预测模型(dem)的多项式次数。8.根据前述权利要求1至7中至少一项所述的方法,包括以下附加步骤:-通过比较由所述数据预测模型(dem)至少基于在最新子系统步骤输出(mso
1st
)之前的步骤所计算的数字数据(dta
prd
)与所述发送子系统(sms)的同一时间点(pit)的子系统步骤输出(mso
1st
)的最新数字数据(dta
rel
),确定误差(erd),-根据在所述误差(erd)与先前子系统时间步长(smp
prv
)之间的预定关系,调整所述发送子系统(sms)的所述子系统时间步长(smp)。9.根据权利要求8所述的方法,其中,在所述误差(erd)与所述先前子系统时间步长(smp
prv
)之间的所述预定关系是递减函数。10.根据权利要求9所述的方法,其中,将所调整的子系统时间步长(smp
adj
)与所述误差(erd)和所述先前子系统时间步长(smp
prv
)相关联的所述预定关系被定义为:(smp
adj
)=(smp
prv
)*beta*(rtto/erd)
∧
(n 1)其中:n:数据预测模型(dem)的多项式次数rtto:相对容差erd:误差,优选是相对误差beta:在[0.5,1.0[内的安全系数,优选为0.9。11.根据前述权利要求8至10中至少一项所述的方法,包括以下附加步骤:-对于至少一个子系统(sms),限制即将到来的子系统时间步长(smp),使得其对应于具有与待时间步长受限的子系统的输入相连的输出的任意子系统(sms)的第一即将到来步长结束时间。12.根据至少前述权利要求11所述的方法,包括以下附加步骤:-选择所有子系统步骤输出(mso)都与不支持可变子系统时间步长(smp)的子系统(smr)的子系统步骤输入(msi)相连的子系统(sms),-扩展所选择的子系统(sms)的即将到来的子系统时间步长(smp)大小,直到具有与所述子系统步骤输出(mso)相连的子系统步骤输入(msi)的子系统(smr)的下一个步骤结束为止。13.根据至少一个前述权利要求所述的方法,其中,当所述发送子系统(smr)提供关于给定相对容差(rtto)的可靠数据预测模型(dem)时,所述延迟时间(dlt)适于延迟发送所述
数字数据(dta)直到预定时间点(pit)为止。14.根据至少一个前述权利要求所述的方法,包括附加步骤:-从一组预定的数据预测模型类型(det)中选择单个数据预测模型类型(det),以及-将所选择类型的至少两个数据预测模型(dem)分别根据先前的1、2、3或更多个步骤的子系统步骤输出(mso)的相应发送子系统(sms)的数字数据(dta)进行校准,不包括最后一个输出(mso
lst
),-通过比较由所述数据预测模型(dem)至少基于在最新子系统步骤输出(mso
1st
)之前的步骤所计算的数字数据(dta
prd
)与所述发送子系统(sms)的同一时间点(pit)的子系统步骤输出(mso
1st
)的最新数字数据(dta
rel
),确定每个所述数据预测模型(dem)的误差(erd),-从所选择的数据预测模型类型(det)的数据预测模型(dem)中选择具有最小误差(erd)的数据预测模型(dem)。15.根据前述权利要求1-14中至少一项所述的方法,其中,所述系统(sys)的所述仿真是迭代的,使得所述仿真子系统(smn)中的至少一个迭代地与至少一个其它仿真子系统(smn)交互,其中,这些子系统是迭代子系统(ism)。16.根据权利要求15所述的方法,其中,所述迭代子系统(ism)中的至少一个被提供为流形模型,至少双重模型(tmd),包括主模型(mmd)和至少一个代理模型(smd),其中,所述代理模型(smd)能够重复至少单个协同仿真步骤,优选地能够重复多个协同仿真步骤,其中,所述代理模型(smd)包括与所述主模型(mmd)至少部分相同的子系统步骤输出(mso)参数和子系统步骤输入(msi)参数,所述方法包括被分配给定义的子系统时间步长(smp)的附加步骤:a)所述代理模型(smd)接收至少部分地源自至少一个其他输入提供子系统(smn)的子系统步骤输入(msi),b)所述代理模型(smd)根据所述子系统步骤输入(msi)计算子系统步骤输出(mso),所述子系统步骤输入(msi)至少部分地源自的所述至少一个其他输入提供子系统(smn)中的至少一个,计算所述子系统步骤输出(mso)包括待被提供给所述代理模型(smd)的下一迭代循环的输入的至少一部分,c)重复循环步骤a)-b),直到满足输入提供子系统(smn)和所述代理模型(smd)的子系统步骤输出(mso)的相互收敛标准(cct)为止,d)将至少部分的收敛子系统步骤输出(mso)提供给所述主模型(mmd)作为所述子系统步骤输入(msi)的至少一部分,e)所述主模型(mmd)针对所定义的子系统时间步长(smp)根据所述子系统步骤输入(msi)来计算所述子系统步骤输出(mso)。17.根据权利要求16所述的方法,包括以下附加步骤:i.定义表示所述模型(mmd)的线性化的状态空间表示的矩阵a、b、c和d,ii.计算所述系统的所述状态空间表示的由c((si-a)-1
)b d定义的预解矩阵,其中-1
表示矩阵求逆,iii.将单项基的拉普拉斯变换计算为填充有1、t、t
∧2…
的各个拉普拉斯变换的第一单列矩阵,其中,t表示时间,并且其中指数达到多项式子系统步骤输入(msi)的最大多项式次
数,iv.计算所述预解矩阵和所述第一单列矩阵的克罗内克积,v.在第二单列矩阵中收集每个子系统步骤输入(msi)的多项式系数,vi.计算所述克罗内克积和所述第二单列矩阵的拉普拉斯逆变换的矩阵乘积vii.将矩阵p计算为c
×
(si-a)-1
,其中,i表示与a相同大小的单位矩阵,并且其中,s表示拉普拉斯域的变量,viii.计算所述矩阵p与包含所述子系统在协同仿真步骤(smp)的与在前协同仿真步骤结束对应的开始时的状态变量的向量的矩阵向量积,ix.计算所述矩阵向量积在所述协同仿真步骤(smp)的对应于所述延迟时间(dlt)的长度上的拉普拉斯逆变换x.将线性部分计算为所述矩阵乘积与所述拉普拉斯逆变换之和,xi.根据权利要求1、2或3的步骤(e)来计算控制部分,其中,所述主模型(mmd)是所述接收子系统(smr),xii.将所述代理模型(smd)的所述子系统步骤输出(mso)计算为所述线性部分和所述控制部分之和。18.根据权利要求16所述的方法,其中,所述代理模型(smd)是所述主模型(mmd)的至少部分线性近似。19.根据权利要求16、17或18所述的方法,其中,收敛的子系统步骤输出(mso)仅覆盖所述主模型(mmd)的所述子系统步骤输入(msi)的一部分,所述方法包括以下附加步骤:-根据权利要求1、2或3的步骤(e)来计算所述主模型(mmd)的所述子系统步骤输入(msi)的其余部分,其中,所述主模型(mmd)是所述接收子系统(smr)。20.根据权利要求17或18所述的方法,其中,所有子系统(smn)是流形的,并且其中,使用由以下各项构建的线性系统,能够在单次迭代中对每个代理子系统(smd)立即完成迭代求解:-所述代理子系统所表示的在所有子系统步骤输入(smi)与所有子系统步骤输出(smo)之间的线性关系-根据权利要求3-7中的至少一项,多项式数据预测模型(dem)所表示的在即将到来的子系统时间步长(smp)的预测数据(edt)与已知值(datre1)之间的线性关系,当对整个子系统的集合完成了一次求解时,该线性关系对每个子系统都被设置为相同的,从而创建整个系统(sys)的代理,-在权利要求16中作为常数项描述的其余部分(独立于在所述子系统时间步长(smp)的结束时预期的下一个子系统步骤输入(msi)),以及-所有子系统(sms)的子系统步骤输出(mso)与这些子系统(smr)的子系统步骤输入(msi)之间的连接信息,该连接信息能够被看作是允许子系统步骤输出(mso)不连接、连接
到一个或连接到多个子系统步骤输入(msi)的置换的扩展概念,并且其中这种关系是线性的。21.一种计算机系统(cps),包括至少一个处理器,所述至少一个处理器被布置和配置为执行根据前述权利要求中任一项所述的计算机实现的方法的步骤。22.一种编码有可执行指令的计算机可读介质,所述可执行指令在被执行时,使得根据权利要求21所述的计算机系统(cps)执行根据权利要求1至21中任一项所述的方法。
技术总结
一种用于系统(SYS)的数字模块化仿真的计算机系统(CPS)和计算机实现的方法,包括:(a)将该系统(SYS)分解为至少两个子单元(SSY)仿真子系统(SMN),(b)在相应的子系统时间步长(SMP)期间,逐步重复地仿真相应的子单元(SSY),根据子系统步骤输入(MSI)产生子系统步骤输出(MSO)。为了提高精度和性能,该方法包括附加步骤:(c)向接收子系统(SMR)发送子系统步骤输入(MSI)并且在生成子系统步骤输出(MSO)之前在延迟时间(DLT)上仿真该子系统(SMN),(d)从发送子系统(SMS)接收连接接口变量(TRD),该连接接口变量包括以下各项中的至少一项:-数字数据(DTA),-至少该数字数据(DTA)的数据预测模型(DEM)的参数,-分配给该数字数据(DTA)的数据预测模型(DEM),(e)在该延迟时间(DLT)上由数据预测模型(DEM)预测该数字数据(DTA),以获得由该发送子系统(SMS)提供的该接口变量(TRD)的预测数字数据(EDT),(f)启动该接收子系统(SMR)的下一仿真步骤,根据子系统步骤输入(MSI)生成下一子系统步骤输出(MSO),其中该子系统步骤输入(MSI)包括该预测数字数据(EDT)。数字数据(EDT)。数字数据(EDT)。
技术研发人员:约翰
受保护的技术使用者:西门子工业软件公司
技术研发日:2021.12.01
技术公布日:2023/8/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。