技术特征:
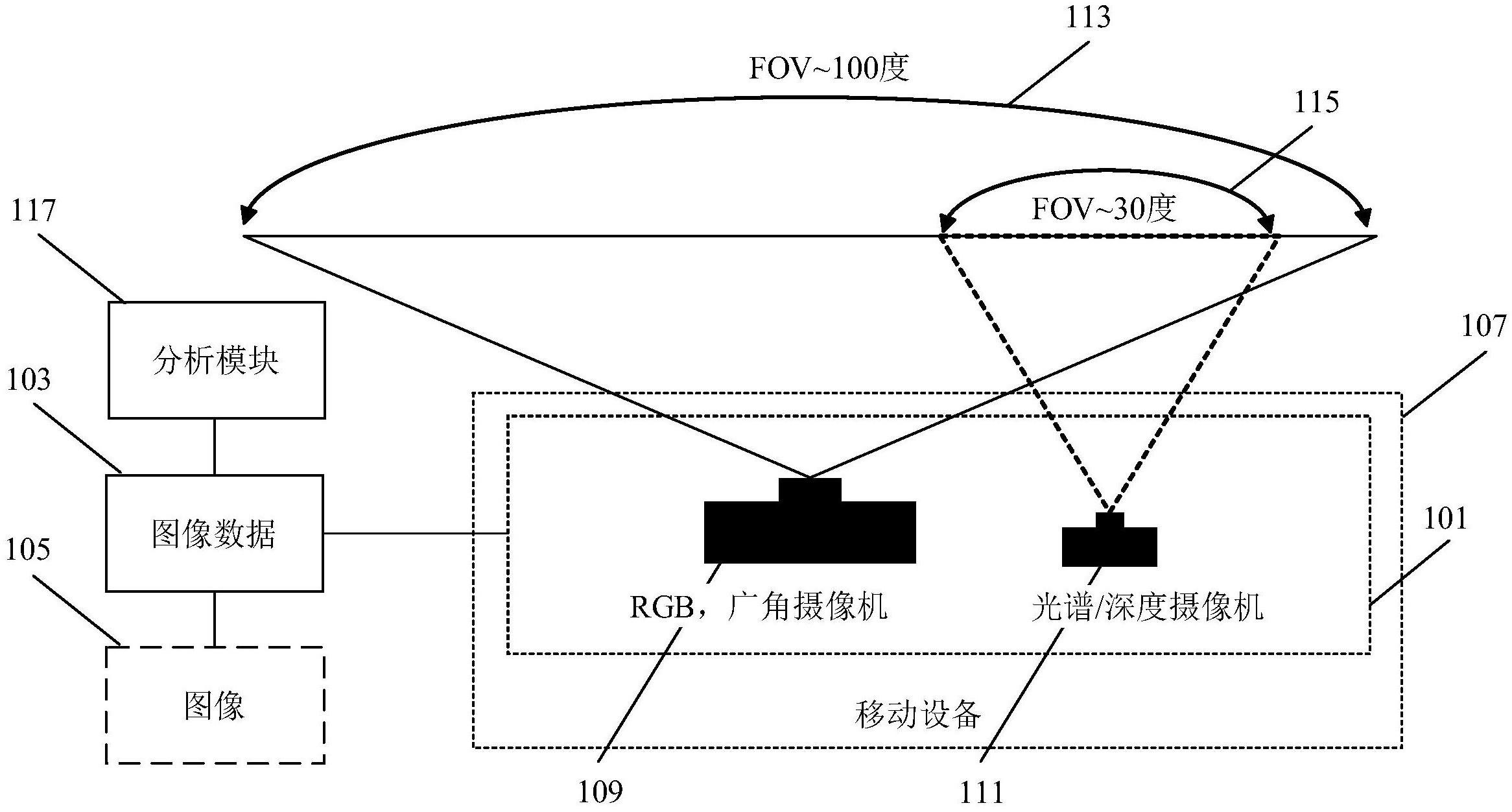
1.一种成像结构,其特征在于,用于生成表示对象或场景的图像的数据,所述成像结构包括:第一图像捕获设备,用于在第一视场内生成第一波段中的图像数据;第二图像捕获设备,用于在第二视场内生成至少第二波段中的图像数据,其中,所述第二视场在所述第一视场内。2.根据权利要求1所述的成像结构,其特征在于,所述第一图像捕获设备包括rgb图像传感器元件。3.根据权利要求1或2所述的成像结构,其特征在于,所述第二图像捕获设备包括图像传感器元件,所述图像传感器元件用于生成电磁频谱中的人类可见区域之外的波段中的图像数据。4.根据权利要求1或2所述的成像结构,其特征在于,所述第二图像捕获设备包括深度传感器,所述深度传感器用于生成表示所述第二图像捕获设备与所述对象或场景之间的距离测量值的深度数据。5.根据上述权利要求中任一项所述的成像结构,其特征在于,所述第二图像捕获设备用于相对于所述第一视场修改所述第二视场的位置。6.根据上述权利要求中任一项所述的成像结构,其特征在于,还包括:第三图像捕获设备,用于在第三视场内生成第三波段中的图像数据,其中,所述第三视场在所述第一视场内。7.根据权利要求6所述的成像结构,其特征在于,所述第三图像捕获设备包括深度传感器,所述深度传感器用于生成表示所述第三图像捕获设备与所述对象或场景之间的距离测量值的深度数据。8.根据上述权利要求中任一项所述的成像结构,其特征在于,所述第一图像捕获设备和/或所述第二图像捕获设备和/或所述第三图像捕获设备由图像捕获传感器的子区域分别限定。9.根据上述权利要求中任一项所述的成像结构,其特征在于,所述第一图像捕获设备是广角摄像机。10.根据上述权利要求中任一项所述的成像结构,其特征在于,所述第二图像捕获设备是光谱成像设备,所述第二波段包括以下中的至少一个:300nm
–
1000nm、650nm
–
1000nm和1000nm
–
2000nm。11.根据权利要求6或7所述的成像结构,其特征在于,所述第三图像捕获设备用于生成以下波段中的至少一个中的图像数据:800nm
–
1000nm、100nm
–
1500nm和1500nm后波段。12.根据权利要求6或7所述的成像结构,其特征在于,所述第一图像捕获设备和所述第二图像捕获设备中的至少一个不生成对应于所述第三波段的图像数据。13.根据权利要求12所述的成像结构,其特征在于,所述第一图像捕获设备和所述第二图像捕获设备中的至少一个包括用于阻挡来自所述第三波段的电磁辐射的滤波器。14.一种用于生成对象或场景的图像的方法,其特征在于,所述方法包括:使用具有第一视场的第一图像捕获设备生成所述电磁频谱的第一波段中的表示第一图像的第一图像数据;分析所述第一图像数据以确定所述第一图像的显著部分的存在;
基于所述分析,使用具有比所述第一图像捕获设备的所述第一视场窄的第二视场的第二图像捕获设备生成所述电磁频谱的第二波段中的所述显著部分的第二图像数据。15.根据权利要求14所述的方法,其特征在于,还包括:使用具有第三视场的第三图像捕获设备生成所述电磁频谱的第三波段中的表示第三图像的第三图像数据。16.根据权利要求14或15所述的方法,其特征在于,还包括:相对于所述第一视场调整所述第二图像捕获设备的所述第二视场的位置。17.根据权利要求15所述的方法,其特征在于,还包括:相对于所述第一视场调整所述第三图像捕获设备的所述第三视场的位置。18.根据权利要求14至17中任一项所述的方法,其特征在于,还包括:基于所述显著部分在所述第一视场内的确定的位置,调整所述第二视场的当前位置,使得所述确定的位置和所述当前位置重合。19.根据权利要求18所述的方法,其特征在于,调整所述第二视场的所述当前位置是通过机械部件或电子部件实现的。20.根据权利要求14至19中任一项所述的方法,其特征在于,还包括:生成表示输出图像的输出图像数据,所述输出图像包括从所述第一图像数据、所述第二图像数据和所述第三图像数据中的至少一个导出的信息。21.根据权利要求20所述的方法,其特征在于,所述输出图像包括所述对象或场景的深度图。22.根据权利要求14至21中任一项所述的方法,其特征在于,所述输出图像还包括所述对象或场景的光谱图像。23.一种非瞬时性机器可读存储介质,其特征在于,使用用于生成表示对象或场景的图像数据的指令编码,所述指令可由机器的处理器执行,从而使所述机器:使用具有第一视场的第一图像捕获设备生成所述电磁频谱的第一波段中的表示第一图像的第一图像数据;分析所述第一图像数据以确定所述第一图像的显著部分的存在;基于所述分析,使用具有比所述第一图像捕获设备的所述第一视场窄的第二视场的第二图像捕获设备生成所述电磁频谱的第二波段中的所述显著部分的第二图像数据。24.根据权利要求23所述的非瞬时性机器可读存储介质,其特征在于,还用指令编码,所述指令可由所述机器的所述处理器执行,从而使所述机器:使用具有第三视场的第三图像捕获设备生成所述电磁频谱的第三波段中的表示第三图像的第三图像数据。25.根据权利要求23或24所述的非瞬时性机器可读存储介质,其特征在于,还用指令编码,所述指令可由所述机器的所述处理器执行,从而使所述机器:相对于所述第一视场调整所述第二图像捕获设备的所述第二视场的位置。26.根据权利要求24所述的非瞬时性机器可读存储介质,其特征在于,还用指令编码,所述指令可由所述机器的所述处理器执行,从而使所述机器:相对于所述第一视场调整所述第三图像捕获设备的所述第三视场的位置。27.根据权利要求23至26中任一项所述的非瞬时性机器可读存储介质,其特征在于,还
用指令编码,所述指令可由所述机器的所述处理器执行,从而使所述机器:基于所述显著部分在所述第一视场内的确定的位置,调整所述第二视场的当前位置,使得所述确定的位置和所述当前位置重合。28.根据权利要求25或26所述的非瞬时性机器可读存储介质,其特征在于,还用指令编码,所述指令可由所述机器的所述处理器执行,从而使所述机器:操作致动器,以调整所述第二视场和所述第三视场中的至少一个的位置。29.根据权利要求23至28中任一项所述的非瞬时性机器可读存储介质,其特征在于,还用指令编码,所述指令可由所述机器的所述处理器执行,从而使所述机器:生成表示输出图像的输出图像数据,所述输出图像包括从所述第一图像数据、所述第二图像数据和所述第三图像数据中的至少一个导出的信息。
技术总结
在一些示例中,提供了一种成像结构,用于生成表示对象或场景的图像的数据。所述成像结构可以是用户设备(例如,智能设备)等设备的一部分,所述成像结构可以包括能够在第一视场内生成第一波段中的图像数据的第一图像捕获设备和能够在第二视场内生成第二波段中的图像数据的第二图像捕获设备,其中,所述第二视场在所述第一视场内。在所述第一视场内。在所述第一视场内。
技术研发人员:埃罗
受保护的技术使用者:华为技术有限公司
技术研发日:2020.12.07
技术公布日:2023/8/20
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。