技术特征:
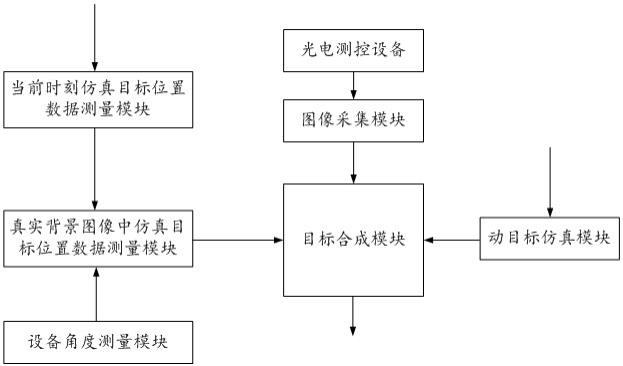
1.一种光电测控设备跟踪操作仿真训练系统,其特征在于,包括:图像采集模块,用于采集光电测控设备输入的图像,并将该图像转化为标准格式的真实背景图像后传输给目标合成模块;动目标仿真模块,用于加载三维模型文件,生成仿真目标三维模型,实现仿真目标三维模型的运动控制,并将仿真目标三维模型传输给目标合成模块;当前时刻仿真目标位置数据测量模块,用于根据预先载入的仿真目标运行轨迹文件,按照不同时刻进行位置解算与姿态解算,获得当前时刻仿真目标位置及姿态数据,并将当前时刻仿真目标位置及姿态数据传输给真实背景图像中仿真目标位置数据测量模块;设备角度测量模块,用于实时采集获得光电测控设备实际视轴指向位置数据,并将光电测控设备实际视轴指向位置数据传输给真实背景图像中仿真目标位置数据测量模块;真实背景图像中仿真目标位置数据测量模块,用于根据当前时刻仿真目标位置及姿态数据和光电测控设备实际视轴指向位置数据之间的位置关系进行解算获得真实背景图像中仿真目标位置数据,并将真实背景图像中仿真目标位置数据传输给目标合成模块;目标合成模块,用于接收图像采集模块发送的真实背景图像、真实背景图像中仿真目标位置数据测量模块发送的真实背景图像中仿真目标位置数据和动目标仿真模块发送的仿真目标三维模型,并根据真实背景图像中仿真目标位置数据在真实背景图像上叠加仿真目标,输出合成图像,从而实现动目标仿真的功能。2.一种光电测控设备跟踪操作仿真训练方法,其特征在于,采用权利要求1所述的一种光电测控设备跟踪操作仿真训练系统实现,该方法包括以下步骤:步骤一、图像采集及预处理;采集光电测控设备输入的图像,并将该图像转化为指定格式的真实背景图像;步骤二、加载三维模型文件,生成仿真目标三维模型;步骤三、仿真目标运动轨迹解算;s3.1位置解算,获取当前时刻仿真目标位置数据;s3.2姿态解算,获取当前时刻仿真目标姿态数据;步骤四、实时采集获取光电测控设备实际视轴指向位置数据;步骤五、仿真目标投影变换;s5.1仿真目标位置投影变换;s5.2仿真目标尺寸投影变换;s5.3仿真目标叠加,输出合成图像。3.根据权利要求2所述的一种光电测控设备跟踪操作仿真训练方法,其特征在于,步骤s3.1的具体操作流程如下:s3.1.1将光电测控设备中心位置坐标p由原坐标系c0转换到仿真目标运行轨迹所在坐标系c1下的相应位置p’;s3.1.2计算在坐标系c1下,当前时刻为t时,仿真目标位置tt与相应位置p’的相对位置tt’;s3.1.3将相对位置tt’转换为以光电测控设备所在位置为坐标原点的球坐标系c2下的相对位置tt’(at,et,rt),由此完成仿真目标的位置解算;at表示t时刻仿真目标相对于光电测控设备水方向偏角,et表示t时刻仿真目标相对于光电测控设备垂直方向偏角,rt表示
t时刻仿真目标与光电测控设备之间的距离。4.根据权利要求3所述的一种光电测控设备跟踪操作仿真训练方法,其特征在于,步骤s3.2的具体操作流程如下:假设在预设的仿真目标运行轨迹中,当前时刻仿真目标位置坐标为f,前一时刻仿真目标位置坐标为f’,则仿真目标的瞬时速度方向视作与二者连线同向,仿真目标速度向量v的方向与以坐标f’为起点、以坐标f为终点的向量f’f的方向相同,即仿真目标中轴线x
p
应平行于向量f’f,仿真目标尾部在坐标f’一侧且头部在坐标f一侧,仿真目标前端对应飞行方向,根据仿真目标的瞬时速度方向进行解算,即瞬时速度方向与水平方向之间的夹角即为俯仰角α,瞬时速度方向在水平方向的投影与发射坐标系x
f
轴的夹角即为偏航角β;若预设的仿真目标运行轨迹中同时包含滚转角γ,则直接使用。5.根据权利要求2所述的一种光电测控设备跟踪操作仿真训练方法,其特征在于,步骤s5.1的具体操作流程如下:按照步骤三完成仿真目标运动轨迹解算后,结合步骤四获得的光电测控设备实际视轴指向位置数据,实现仿真目标在图像坐标系下的投影变换,即将仿真目标空间位置tt’(at,et,rt)转换为在图像坐标系下的坐标位置tt
’’
(xt,yt);变换公式如式(2)所示:(2);式中,xt表示t时刻仿真目标投影到真实背景图像中的像素位置的x坐标,yt表示t时刻仿真目标投影到真实背景图像中的像素位置的y坐标,xt和yt均以真实背景图像的左上角为坐标原点;at表示t时刻仿真目标相对于光电测控设备水方向偏角;ac为光电测控设备中心指向值的方位角;et表示t时刻仿真目标相对于光电测控设备垂直方向偏角;ec为光电测控设备中心指向值的俯仰角;为光电测控设备中图像探测器单个像素在焦距为f时的张角;imgw为真实背景图像宽度,单位为像素数;imgh为真实背景图像高度,单位为像素数。6.根据权利要求5所述的一种光电测控设备跟踪操作仿真训练方法,其特征在于,步骤s5.2的具体操作流程如下:几何光学的物象关系公式为:(3),rt表示t时刻仿真目标与光电测控设备之间的距离,v为仿真目标的像距;f为光电测控设备中图像探测器的焦距;由式(3)计算出仿真目标在t时刻与光电测控设备之间的距离为rt时,仿真目标的像距v为:(4);由几何光学的物象关系相似三角形得到以下公式:(5);将式(4)代入式(5)得到仿真目标尺寸为h时在光电测控设备中图像探测器上的投影尺寸为:(6);设光电测控设备中图像探测器的像元尺寸为,则仿真目标在真实背景图像上的投影像素数为:(7)。7.根据权利要求6所述的一种光电测控设备跟踪操作仿真训练方法,其特征在于,步骤s5.3的具体操作流程如下:
当仿真目标投影位置处于真实背景图像显示范围内时,即xt和yt同时满足式(8)所示条件时进行仿真目标的叠加显示;当仿真目标投影位置不在真实背景图像显示范围内时,即xt和yt同时不满足式(8)所示条件时不进行仿真目标的叠加显示;(8),xt表示t时刻仿真目标投影到真实背景图像中的像素位置的x坐标;yt表示t时刻仿真目标投影到真实背景图像中的像素位置的y坐标;imgw为真实背景图像宽度,单位为像素数;imgh为真实背景图像高度,单位为像素数;结合式(2)和式(8)实现在真实背景图像上的指定位置、指定尺寸、指定姿态的仿真目标的叠加,输出合成图像,实现动目标仿真。
技术总结
一种光电测控设备跟踪操作仿真训练系统及方法,涉及目标运动轨迹测量领域。该方法包括:采集光电测控设备输入的图像并将其转化为标准格式的真实背景图像;加载三维模型文件,生成仿真目标三维模型;仿真目标运动轨迹解算,获取当前时刻仿真目标位置和姿态数据;实时采集光电测控设备实际视轴指向位置数据;仿真目标位置投影变换;仿真目标尺寸投影变换;仿真目标叠加,输出合成图像。本发明采用增强现实技术将虚拟飞行目标信息图形化后应用到真实背景图像上,虚拟与现实信息相互补充、叠加,具有实时交互性,扩展了操作人员的感知范围,可逼真还原各类测量任务过程,为设备研制提供了学习训练环境,提升了设备智能化水平。提升了设备智能化水平。提升了设备智能化水平。
技术研发人员:张艳超 余毅 高策 赵立荣
受保护的技术使用者:中国科学院长春光学精密机械与物理研究所
技术研发日:2023.07.07
技术公布日:2023/8/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。