技术特征:
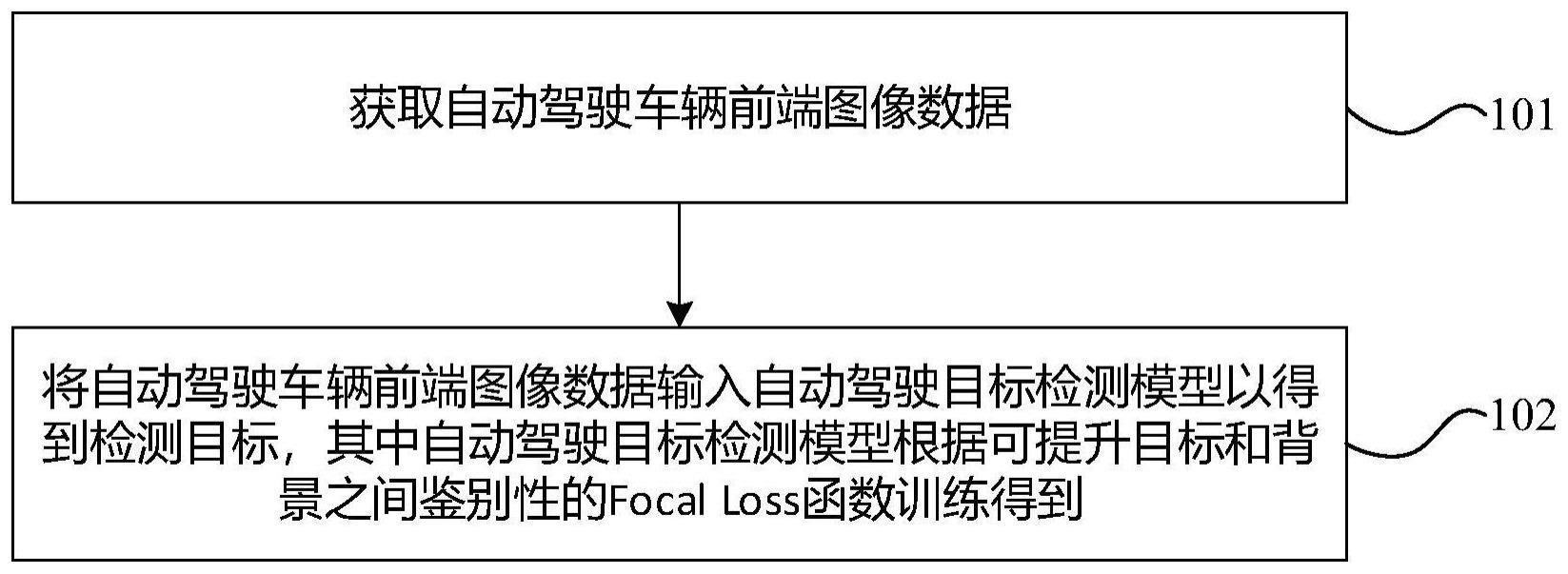
1.一种自动驾驶目标检测方法,其特征在于,包括:获取自动驾驶车辆前端图像数据;将所述自动驾驶车辆前端图像数据输入自动驾驶目标检测模型以得到检测目标,其中所述自动驾驶目标检测模型根据可提升目标和背景之间鉴别性的focalloss函数训练得到。2.根据权利要求1所述的自动驾驶目标检测方法,其特征在于,所述可提升目标和背景之间鉴别性的focalloss函数包括:正样本损失函数和负样本损失函数;所述负样本损失函数包括用于削弱目标中心附近位置点作为负样本损失的第一因子和用于削弱容易负样本损失的第二因子。3.根据权利要求2所述的自动驾驶目标检测方法,其特征在于,所述目标检测模型包括低容量主干网络、连接层和多个任务头,所述多个任务头包括目标中心点定位热图预测分支,所述目标中心点定位热图预测分支用于预测目标中心点。4.根据权利要求3所述的自动驾驶目标检测方法,其特征在于,所述目标中心点定位热图预测分支输出的预测目标中心点的高斯热图为:其中,w、h、c、r分别为输出特征图的宽,高,目标类别和步幅。5.根据权利要求3所述的自动驾驶目标检测方法,其特征在于,所述多个任务头还包括:目标中心点量化偏差预测分支、目标宽高预测分支和目标中心点到其接地点的偏移预测分支;所述目标中心点量化偏差预测分支用于预测由于步幅带来的目标中心点离散化偏差;所述目标宽高预测分支用于预测目标宽度和高度;所述目标中心点到其接地点的偏移预测分支用于预测目标中心点到其各个接地点的2d偏移;所述目标检测模型用于根据所述目标中心点定位热图预测分支、目标中心点量化偏差预测分支、目标宽高预测分支输出检测目标的目标框,还用于根据所述目标中心点定位热图预测分支、目标中心点量化偏差预测分支、目标中心点到其接地点的偏移预测分支输出检测目标的接地点。6.根据权利要求3所述的自动驾驶目标检测方法,其特征在于,所述自动驾驶目标检测模型用于检测车辆前端障碍物,将所述自动驾驶车辆前端图像数据输入用于检测车辆前端障碍物的自动驾驶目标检测模型以得到检测目标,包括:对所述自动驾驶车辆前端图像数据进行预处理,以使所述自动驾驶车辆前端图像数据转换为满足所述低容量主干网络输入要求的预设尺寸图像;将所述预设尺寸图像输入具有低容量主干网络的目标检测模型,以获取预设尺寸图像上的障碍物目标框和障碍物接地点;将所述障碍物目标框和障碍物接地点进行尺寸仿射变换,得到所述自动驾驶车辆前端图像数据上的障碍物目标框和障碍物接地点;对所述自动驾驶车辆前端图像数据上的障碍物目标框进行非极大抑制处理,去掉重复
的障碍物目标框,以得到最终检测障碍物目标框及障碍物接地点。7.根据权利要求6所述的自动驾驶目标检测方法,其特征在于,所述将所述预设尺寸图像输入具有低容量主干网络的目标检测模型,以获取预设尺寸图像上的障碍物目标框和障碍物接地点,包括:根据目标中心定位热图预测分支,使用置信度阈值过滤背景点和目标中心附近位置点,输出预设数量局部置信度最大值点作为障碍物中心点;根据目标中心点量化偏差预测分支,输出障碍物中心点的量化偏差;根据目标宽高预测分支输出障碍物的宽度和高度;根据目标中心点量化偏差预测分支输出障碍物中心点到接地点的2d偏移预测值;根据所述检测障碍物中心点的位置索引以及所述障碍物中心点的量化偏差、障碍物的宽度和高度和障碍物中心点到接地点的2d偏移预测值获取障碍物目标框和障碍物接地点。8.根据权利要求6或7所述的自动驾驶目标检测方法,其特征在于,所述自动驾驶目标检测模型用于检测车辆前端障碍物,对所述自动驾驶目标检测模型进行训练包括:获取训练数据,所述训练数据包括根据实际驾驶场景采样的多场景分布图像数据及其对应的标注数据,所述标注数据包括高速场景障碍物目标框和接地点,非高速场景障碍物目标框和接地点以及行人目标框和接地点;通过所述训练数据以及所述可提升目标和背景之间鉴别性的focalloss函数对所述训练自动驾驶目标检测模型进行训练。9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至8任一项所述的自动驾驶目标检测方法。10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至8任一项所述的自动驾驶目标检测方法。
技术总结
本发明提供一种自动驾驶目标检测方法、装置、电子设备及存储介质,涉及自动驾驶技术领域,通过获取自动驾驶车辆前端图像数据,将自动驾驶车辆前端图像数据输入自动驾驶目标检测模型以得到检测目标,其中自动驾驶目标检测模型根据可提升目标和背景之间鉴别性的Focal Loss函数训练得到,可以拉开目标和背景之间的置信度差距,减少背景对检测目标的影响,提升目标检测的准确性。目标检测的准确性。目标检测的准确性。
技术研发人员:江伟
受保护的技术使用者:嬴彻星创智能科技(上海)有限公司
技术研发日:2023.03.16
技术公布日:2023/7/20
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。