技术特征:
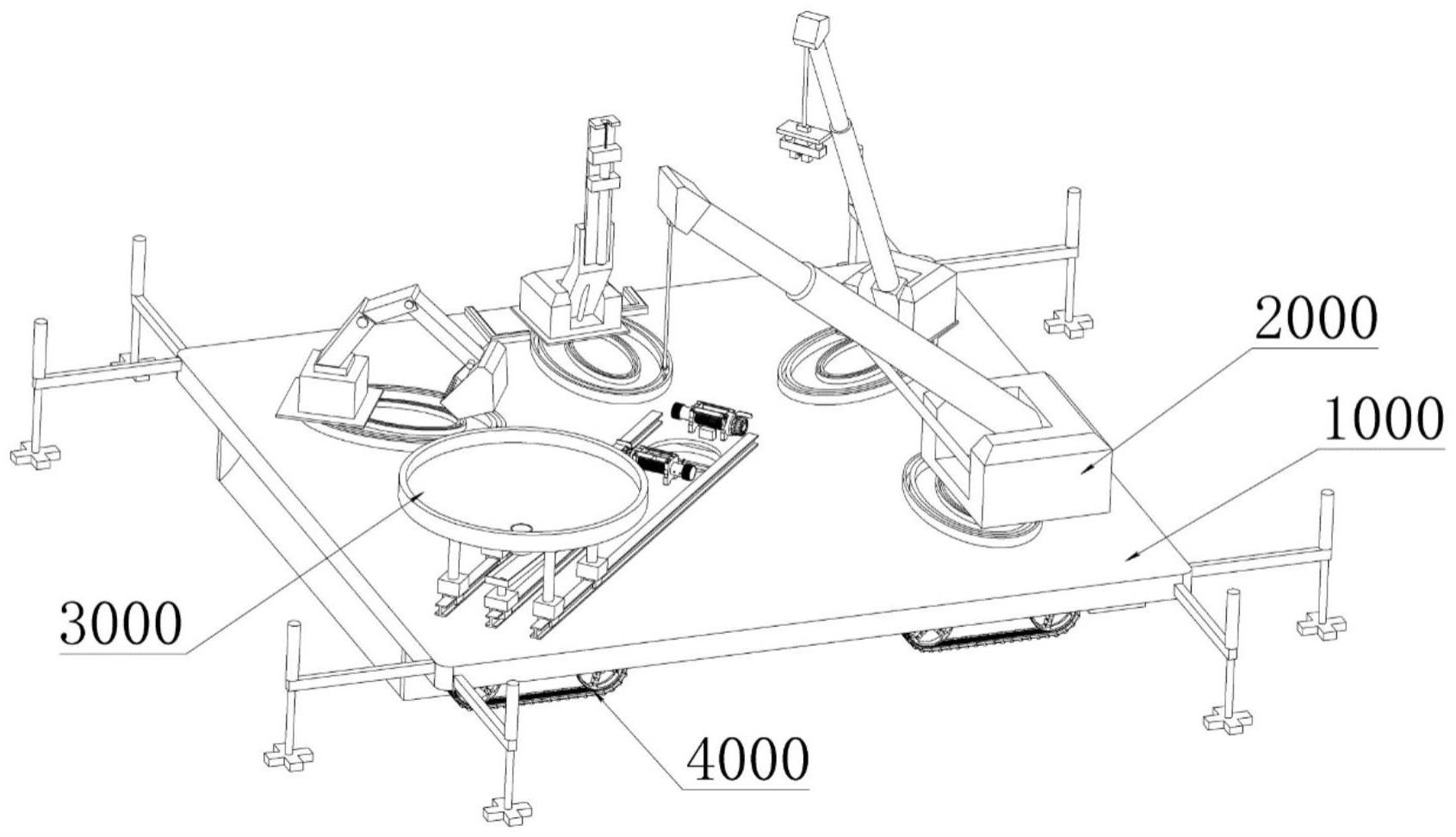
1.一种钻孔灌注桩施工机器人,其特征在于,包括作为主体的基座部分(1000)以及安装在所述基座部分(1000)上端的机械部分(2000);所述基座部分(1000)包括基座(1001)、安装在所述基座(1001)上的椭圆轨道单元(1100)以及安装在所述椭圆轨道单元(1100)上的机械底座单元(1200);所述椭圆轨道单元(1100)包括四组椭圆轨道组,每组分别包括内外对应的内部椭圆轨道(1102)与外部椭圆轨道(1101),四组椭圆轨道组中的三组对称分布于基座(1001)上半部分,另外一组竖向安装于基座(1001)下半部分右侧;所述机械底座单元(1200)包括分别安装在所述外部椭圆轨道(1101)与内部椭圆轨道(1102)上的一个第一电动小车(1201),两个所述第一电动小车(1201)上安装有第一液压转盘(1202),所述第一液压转盘(1202)上安装有机械安装座(1203);所述机械部分(2000)包括安装于所述基座(1001)下部右侧的单个椭圆轨道组上具有的机械安装座(1203)上的汽车吊机械臂(2100)以及依次安装于所述基座(1001)上部从右至左三个椭圆轨道组上具有的机械安装座(1203)上的振动起吊机械臂(2200)、旋挖机机械臂(2300)、挖机机械臂(2400),所述振动起吊机械臂(2200)的吊臂下端安装有振动锤(2201)。2.根据权利要求1所述的钻孔灌注桩施工机器人,其特征在于,所述基座部分(1000)还包括检测下放单元(1300),所述检测下放单元(1300)由位于所述基座(1001)中部的中部圆形开口(1303a)构成主体,所述中部圆形开口(1303a)将基座(1001)上下打通,形成一个圆形通道,所述圆形通道中部朝向基座(1001)内开设有内侧矩形开槽(1303b),所述内侧矩形开槽(1303b)内部设有两条横向轨道,所述轨道上安装有第二电动小车(1304);两个所述第二电动小车(1304)通过辅助下放座(1305)连接形成一条可在中部圆形开口(1303a)内横向移动的横杆;位于所述中部圆形开口(1303a)上端两侧在基座(1001)表面上安装有两个电动绞盘(1301),其中一个所述电动绞盘(1301)与超声成孔成槽检测仪(1302a)连接,另一个与操控沉渣厚度检测仪(1302b)连接。3.根据权利要求1所述的钻孔灌注桩施工机器人,其特征在于,所述基座部分(1000)还包括液压支腿单元(1400),所述液压支腿单元(1400)由安装于所述基座(1001)四角的八组支腿组成,每组所述支腿分别由横向液压支腿(1401)与竖向液压支腿(1402)组成,所述横向液压支腿(1401)安装于基座(1001)上,所述竖向液压支腿(1402)安装于横向液压支腿(1401)末端。4.根据权利要求1所述的钻孔灌注桩施工机器人,其特征在于,所述基座部分(1000)还包括底部铲土单元(1500),所述底部铲土单元(1500)包括安装于所述基座(1001)底部前后两侧的两组铲土机构,每一组所述铲土机构均包括安装于基座(1001)底部的提升油缸(1501)以及安装于提升油缸(1501)上的推土铲(1502)。5.根据权利要求1所述的钻孔灌注桩施工机器人,其特征在于,所述基座部分(1000)上端还安装有混凝土灌注部分(3000),所述混凝土灌注部分(3000)位于所述基座(1001)下部左侧,所述述混凝土灌注部分(3000)包括两条第一h型钢轨道(3101),两条所述第一h型钢轨道(3101)尾部覆盖在中部圆形开口(1303a)两侧,每一条所述第一h型钢轨道(3101)上均安装有两个第三电动小车(3102),所述第三电动小车(3102)上端安装有第一电动推杆
(3103),四个所述第一电动推杆(3103)上端安装有漏斗状的混凝土倒料斗(3104)。6.根据权利要求5所述的钻孔灌注桩施工机器人,其特征在于,两条所述第一h型钢轨道(3101)中间安装有一条第二h型钢轨道(3201),所述第二h型钢轨道(3201)头部与第一h型钢轨道(3101)平齐,尾部靠近中部圆形开口(1303a),且位于电动绞盘(1301)后方;所述第二h型钢轨道(3201)上安装有两个第四电动小车(3202),所述第四电动小车(3202)上端安装有第二电动推杆(3203),两个所述第二电动推杆(3203)上端安装有与第二h型钢轨道(3201)同一方向的混凝土输入轨道(3204)。7.根据权利要求1所述的钻孔灌注桩施工机器人,其特征在于,所述基座部分(1000)的下端安装有履带部分(4000),所述履带部分(4000)由通过第二液压转盘(4002)安装于基座(1001)底部的三组行走履带(4001)构成主体,三组所述行走履带(4001)与位于所述基座(1001)上部的三个机械臂、下部的汽车吊机械臂以及混凝土倒料斗相对应安装。8.根据权利要求1所述的钻孔灌注桩施工机器人,其特征在于,所述基座部分(1000)的下端安装有底部辅助部分(5000),所述底部辅助部分(5000)由安装于基座(1001)、且位于中部圆形开口(1303a)底部周围的外部圆形轨道(5001)与内部圆形轨道(5002)构成主体,所述外部圆形轨道(5001)上安装有一组第五电动小车(5003),所述内部圆形轨道(5002)上安装有三组第五电动小车(5003),所述第五电动小车(5003)上均设微型旋转电机;位于所述外部圆形轨道(5001)上的一组第五电动小车(5003)与内部圆形轨道(5002)的两组电动小车(5003)相对位置可对应形成两条直线,每条直线上三个所述第五电动小车(5003)均安装第三电动推杆(5004),位于所述外部圆形轨道(5001)上的第三电动推杆(5004)上安装有第四电动推杆(5101),位于所述内部圆形轨道(5002)上的第三电动推杆(5004)上安装有圆形夹具(5102)。9.根据权利要求8所述的钻孔灌注桩施工机器人,其特征在于,位于所述内部圆形轨道(5002)上的另外一组第五电动小车(5003)上安装有振动电机安装座(5201),所述第五电动小车(5003)通过微型旋转电机与振动电机安装座(5201)连接;所述振动电机安装座(5201)一侧安装有振动电机(5202),另一侧安装有第五电动推杆(5203),所述第五电动推杆(5203)末端连接有混凝土振捣棒(5204)。10.一种钻孔灌注桩施工方法,其特征在于,包括以下步骤:s1、场地平整,提前准备:通过提升油缸(1501)降下推土铲(1502)再通过行走履带(4001)使机器人对场地进行推土平整,完毕后升起推土铲(1502),同时施工人员对桩孔利用全站仪进行定位,并提前设置钢筋笼存放处、泥浆池;s2、桩孔定位,设备固定:通过行走履带(4001)控制机器人移动至桩孔定位位置,使桩孔中部对齐中部圆形开口(1303a)圆心,先控制液压支腿单元(1400)伸出横向液压支腿(1401),再伸出竖向液压支腿(1402)至与地面接触固定;s3、钢护筒埋设:先控制挖机机械臂(2400)下方的第一电动小车(1201)使其移动至靠近中部圆形开口(1303a)位置,再控制挖机机械臂(2400)在中部圆形开口(1303a)下方孔位处地面挖出一米浅坑,再退回挖机机械臂(2400),同理控制振动起吊机械臂(2200)靠近中部圆形开口(1303a),通过控制振动起吊机械臂(2200)上的振动锤(2201)夹取钢护筒并将其垂直移至桩孔上方,吊装到位后将钢护筒直接振动压入土中,最后移回振动起吊机械臂
(2200)并再次移入挖机机械臂(2400)对护筒外侧浅坑用粘土填满,压实,完毕后移回挖机机械臂(2400);s4、旋挖机钻孔:通过第一电动小车(1201)控制旋挖机机械臂(2300)移动靠近中部圆形开口(1303a),并将泥浆池管道通过泥浆连接管道(2301)与旋挖机机械臂(2300)钻头连接,将旋挖机机械臂(2300)钻头中心对准钻孔中心进行钻孔,完毕后移回旋挖机机械臂(2300);s5、成孔检查:将超声成孔成槽检测仪(1302a)探头与电动绞盘(1301)绳索末端连接,通过第二电动小车(1304)移出辅助下放座(1305),将绳索穿过辅助下放座(1305)上方与侧面定滑轮(1306),同时开启超声成孔成槽检测仪(1302a)与电动绞盘(1301)对孔位、孔径、孔深和倾斜度进行检查,确认成孔指标满足规范要求,完毕后控制电动绞盘(1301)收回探头,然后控制第二电动小车(1304)将辅助下放座(1305)移回原位;s6、钢筋笼吊放与固定:控制第一电动小车(1201)将汽车吊机械臂(2100)移动至中部圆形开口(1303a)附近位置,通过汽车吊机械臂(2100)抓取钢筋笼并竖直放入桩孔中,下放至一定高度后控制第五电动小车(5003)在外部圆形轨道(5001)与内部圆形轨道(5002)上形成三点一线,控制第三电动推杆(5004)将第四电动推杆(5101)推至指定高度,控制第四电动推杆(5101)伸出穿过两个圆形夹具(5102)与钢筋笼,实现钢筋笼的支撑固定,然后再调运另一个钢筋笼对此钢筋笼进行精确对准,完成对准后收起下方支撑固定机构,并同理依次逐节下放,完成后将汽车吊机械臂(2100)移回原位;s7、导管安装:与上方钢筋笼同理,通过汽车吊机械臂(2100)抓取导管,垂直放入桩孔后通过支撑固定机构进行支撑固定,然后依次逐节下放,完成后将汽车吊机械臂(2100)移回原位;s8、沉渣厚度检查:将操控沉渣厚度检测仪(1302b)探头与电动绞盘(1301)绳索末端连接,通过第二电动小车(1304)移出辅助下放座(1305),将绳索穿过辅助下放座(1305)上方与侧面定滑轮(1306),同时开启操控沉渣厚度检测仪(1302b)与电动绞盘(1301)对摩擦桩沉渣厚度及桩径沉渣厚度进行检查,如厚度大于标准值则利用导管进行二次清孔,全部合格后控制电动绞盘(1301)收回探头,然后控制第二电动小车(1304)将辅助下放座(1305)移回原位;s9、混凝土浇筑:控制第三电动小车(3102)带动混凝土倒料斗(3104)在第一h型钢轨道(3101)上移动至末端中部圆形开口(1303a)上方对准桩孔,再控制第一电动推杆(3103)收起使混凝土倒料斗(3104)下降直至其下方出料口能够将混凝土直接倒入桩孔中,然后再控制第二电动推杆(3203)升起至混凝土倒料斗(3104)上方,最后通过混凝土搅拌车将混凝土倒入混凝土输入轨道(3204)、再到混凝土倒料斗(3104)最后再到桩孔中进行浇筑;s10、判断孔深深度:若施工孔深在混凝土振捣棒(5204)施工范围内,可控制第五电动小车(5003)上方微型电机将振动电机安装座(5201)上具有的混凝土振捣棒(5204)一侧旋转至中部圆形开口(1303a)内侧,再控制第五电动推杆(5203)将混凝土振捣棒(5204)深入浇筑的混凝土中,启动振动电机(5202)带动混凝土振捣棒(5204)振动,对混凝土进行振捣,浇筑振捣完毕后以相反的方式收回振捣结构与混凝土浇筑结构,最后通过汽车吊机械臂(2100)移至中部圆形开口(1303a)处拔出导管及钢护筒,至此整个钻孔灌注桩流程结束。
技术总结
本发明公开了一种钻孔灌注桩施工机器人及方法,包括基座部分以及安装在所述基座部分上端的机械部分;所述基座部分包括基座、安装在所述基座上的椭圆轨道单元以及安装在所述椭圆轨道单元上的机械底座单元;所述椭圆轨道单元包括四组椭圆轨道组,每组分别包括内外对应的内部椭圆轨道与外部椭圆轨道;所述机械部分包括安装于所述基座下部右侧的单个椭圆轨道组上具有的机械安装座上的汽车吊机械臂以及依次安装于所述基座上部从右至左三个椭圆轨道组上具有的机械安装座上的振动起吊机械臂、旋挖机机械臂、挖机机械臂。本发明通过将各个施工流程实施机械组合在一个装置上,实现钻孔灌注桩全流程一体化,大幅节省施工时间,提高效率及空间利用率。高效率及空间利用率。高效率及空间利用率。
技术研发人员:王帅 王爱勋 傅旭东 李文祥 游明 吴克洋 王明昭 王理 文博
受保护的技术使用者:武汉大学
技术研发日:2023.03.31
技术公布日:2023/7/4
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。