技术特征:
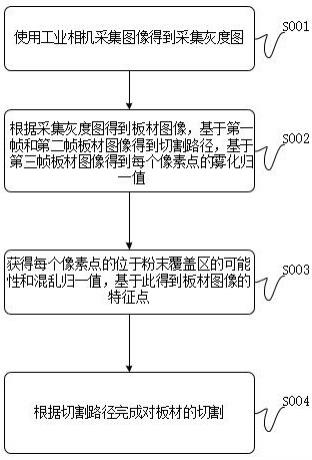
1.基于视觉定位的木工机械智能切割方法,其特征在于,该方法包括以下步骤:获取板材图像;设置预设路径得到路径图像,根据路径图像得到切入口,根据第一帧板材图像和第二帧板材图像的运动矢量和切入口得到第一切割路径;对第三帧板材图像边缘检测,设置初始低阈值得到初始边缘图像,调整低阈值获得若干边缘图像和每个边缘图像中的边缘线,根据边缘像素点的低阈值和低阈值变化量得到每个边缘像素点的雾化值以及所有像素点的雾化归一值;根据第三帧板材图像的灰度直方图得到灰度范围,根据灰度范围得到第三帧板材图像中的若干连通域,将连通域所有像素点灰度值的均值作为连通域的灰度值,获取第三帧板材图像中的每个像素点的第一窗口区域,将每个像素点对应的连通域与相邻所有连通域的灰度值差异、第一窗口区域内连通域的数量得到像素点位于粉末覆盖区的可能性;对第三帧板材图像使用最低低阈值边缘检测得到标准边缘图像,获得边缘像素点的角度差,根据边缘像素点的角度差、边缘像素点数量和每个像素点的第二窗口区域边缘线数量得到像素点的混乱归一值;根据每个像素点的混乱归一值、雾化归一值、位于粉末覆盖区的可能性得到显著抑制因子,获得第三帧板材图像的显著值,根据显著值、雾化归一值、显著抑制因子得到最终显著值,根据最终显著值得到第三帧板材图像的特征点;根据第三帧板材图像的特征点以及第一切割路径得到第二切割路径,将第二切割路径与预设路径比较调整,将第四帧板材图像的特征点以及第二切割路径得到第三切割路径,将第三切割路径与预设路径比较调整,依次类推完成对板材的切割。2.根据权利要求1所述的基于视觉定位的木工机械智能切割方法,其特征在于,所述根据路径图像得到切入口的方法为:路径图像为二值图像,路径图像中路径上的像素点的灰度值为1,其余像素点的灰度值为0,在路径图像第一行、第一列、最后一行、最后一列中找到灰度值为1的像素点,根据预设路径的移动方向得到切入口和切出口。3.根据权利要求1所述的基于视觉定位的木工机械智能切割方法,其特征在于,所述设置初始低阈值得到初始边缘图像,调整低阈值获得若干边缘图像和每个边缘图像中的边缘线的方法为:设置初始低阈值和最低低阈值,初始低阈值每次降低的幅度为1,每个低阈值得到一张边缘图像,统计所有低阈值得到的边缘图像中的边缘线,对于每张边缘图像中边缘线使用otsu阈值分割得到长度阈值,将边缘线长度小于等于长度阈值的边缘线删除,保留长度大于长度阈值的边缘线。4.根据权利要求1所述的基于视觉定位的木工机械智能切割方法,其特征在于,所述根据边缘像素点的低阈值和低阈值变化量得到每个边缘像素点的雾化值以及所有像素点的雾化归一值的方法为:以初始低阈值得到边缘图像为基准,每降低一次低阈值统计降低后的低阈值对应的边缘图像的边缘点数量,对于新增的边缘像素点,得到此时降低后的低阈值和初始低阈值的差记为边缘补全差异,将边缘补全差异与降低后的低阈值的倒数的乘积得到每个新增边缘像素点的雾化值,对于同一个边缘像素点在不同低阈值下都存在雾化值,得到最小的雾化
值作为边缘像素点的雾化值,将初始边缘图像中直接出现的边缘像素点的雾化值定义为0;将非边缘像素点的初始雾化值定义 1,将所有非边缘像素点3*3邻域内所有像素点的雾化值作为非边缘像素点的雾化值,将所有像素点的雾化值线性归一化得到每个像素点的雾化归一值。5.根据权利要求1所述的基于视觉定位的木工机械智能切割方法,其特征在于,所述获得边缘像素点的角度差,根据边缘像素点的角度差、边缘像素点数量和每个像素点的第二窗口区域边缘线数量得到像素点的混乱归一值的方法为:将边缘像素点在边缘线上的切线与水平方向的夹角作为角度差;将边缘像素点在边缘线上的切线与水平方向的夹角作为角度差;式中,为第i条边缘线第j个边缘像素点的角度差,为第i条边缘线上边缘像素点的数量,为第i条边缘线所有边缘像素点的角度差的和即第i条边缘线的扭曲度,为第i条边缘线的长度,为第z个像素点对应的第二窗口区域内边缘线的数量,为第z个像素点对应的第二窗口区域的边缘混乱程度,记为第z个像素点的边缘混乱程度,将像素点的边缘混乱程度线性归一化得到每个像素点的混乱归一值。6.根据权利要求1所述的基于视觉定位的木工机械智能切割方法,其特征在于,所述根据第三帧板材图像的特征点以及第一切割路径得到第二切割路径,将第二切割路径与预设路径比较调整,将第四帧板材图像的特征点以及第二切割路径得到第三切割路径,将第三切割路径与预设路径比较调整的方法为:根据第三帧图像的特征点使用三步搜索法得到第二帧图像到第三帧图像的运动矢量记为第二运动矢量,将第二运动矢量第一位与第一运动矢量的最后一位相连,将新得到的切割路径部分记为第二切割路径,将第二切割路径与预设路径进行对比,若第二切割路径完全包含在预设路径中,继续采集第四帧图像,如果第二切割路径不完全包含在预设路径当中,此时使用算法进行路径规划,对下次路径进行优化,之后采集第四帧图像;获得第四帧图像的特征点,根据特征点得到第三运动矢量和第三切割路径,将第三切割路径和预设路径进行对比,若第三切割路径完全包含在预设路径中,那么继续采集第五帧图像,如果第三切割路径不完全包含在预设路径当中,此时使用算法进行路径规划,对下次切割路径进行优化。
技术总结
本发明涉及图像数据处理技术领域,提出了基于视觉定位的木工机械智能切割方法,包括:获取板材图像;得到路径图像,根据相邻帧板材图像得到切割路径;对于板材图像边缘检测得到边缘图像,根据边缘线获得每个像素点的雾化归一值,得到板材图像的灰度直方图,得到板材图像的连通域和每个像素点的窗口区域,根据连通域数量和相邻连通域灰度差异得到粉末覆盖区的可能性;得到标准边缘图像,根据标准边缘图像边缘线的数量得到像素点的混乱归一值;根据混乱归一值、雾化归一值、位于粉末覆盖区的可能性得到最终显著值,得到板材图像特征点;根据特征点得到切割路径依次类推完成对板材的切割。本发明解决了粉末对图像的影响减少了三步搜索法的计算量。步搜索法的计算量。步搜索法的计算量。
技术研发人员:李帅
受保护的技术使用者:山东交通学院
技术研发日:2023.04.24
技术公布日:2023/5/26
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。