技术特征:
1.一种外科机器人系统,所述外科机器人系统包括:机器人臂,所述机器人臂包括器械驱动单元和外科器械,所述外科器械联接到所述器械驱动单元并且能够通过所述器械驱动单元围绕器械轴线旋转;以及外科控制台,所述外科控制台包括至少一个手柄控制器,所述至少一个手柄控制器具有能够围绕手柄轴线旋转的手柄并且被配置成接收用于移动所述外科器械的用户输入;以及控制器,所述控制器被配置成接收所述用户输入并且响应于所述用户输入而指示所述机器人臂翻转所述外科器械,其中所述用户输入是所述手柄围绕所述手柄轴线的旋转角度,所述旋转角度小于所述外科器械的约180
°
的旋转角度。2.根据权利要求1所述的外科机器人系统,其中所述手柄的所述旋转角度为约110
°
至约160
°
。3.根据权利要求1所述的外科机器人系统,其中所述器械驱动单元被配置成使所述外科器械从中心位置旋转多圈,直到达到机械极限。4.根据权利要求3所述的外科机器人系统,其中所述控制器还被配置成确定所述外科器械在与所述手柄的旋转相同的方向上的旋转是否会遇到所述机械极限。5.根据权利要求4所述的外科机器人系统,其中所述控制器还被配置成响应于遇到所述机械极限的确定而在与所述手柄的所述旋转相反的方向上旋转所述外科器械。6.根据权利要求1所述的外科机器人系统,其中所述控制器还被配置成将所述手柄的所述旋转角度的所述用户输入缩放至所述外科器械的所述旋转角度。7.根据权利要求6所述的外科机器人系统,其中所述外科控制台还包括显示器,所述显示器被配置成显示用于选择所述手柄的旋转角度的阈值的用户界面。8.根据权利要求7所述的外科机器人系统,其中所述控制器还被配置成计算缩放因子,以缩放所述手柄的所述旋转角度的所述用户输入。9.根据权利要求1所述的外科机器人系统,其中所述外科控制台还包括脚踏板,所述脚踏板在被致动时被配置成抓住所述至少一个手柄控制器,以防止所述用户输入移动所述外科器械,直到所述脚踏板被释放。10.一种外科机器人系统,所述外科机器人系统包括:机器人臂,所述机器人臂包括器械驱动单元和外科器械,所述外科器械联接到所述器械驱动单元并且能够通过所述器械驱动单元围绕器械轴线旋转;以及外科控制台,所述外科控制台包括:至少一个手柄控制器,所述至少一个手柄控制器具有能够围绕手柄轴线旋转的手柄并且被配置成接收用于移动所述外科器械的用户输入;以及脚踏板,所述脚踏板被配置成抓住所述至少一个手柄控制器;以及控制器,所述控制器被配置成接收所述用户输入并且响应于所述用户输入指示所述机器人臂通过将所述外科器械旋转180
°
来翻转所述外科器械,其中所述用户输入包括在所述脚踏板以小于180
°
的旋转角度被致动的同时围绕所述手柄轴线旋转所述至少一个手柄控制器。11.根据权利要求10所述的外科机器人系统,其中所述手柄的所述旋转角度为约110
°
至约160
°
。
12.根据权利要求10所述的外科机器人系统,其中所述器械驱动单元被配置成使所述外科器械从中心位置旋转多圈,直到达到机械极限。13.根据权利要求12所述的外科机器人系统,其中所述控制器还被配置成确定所述外科器械在与所述手柄的旋转相同的方向上的旋转是否会遇到所述机械极限。14.根据权利要求13所述的外科机器人系统,其中所述控制器还被配置成响应于遇到所述机械极限的确定而在与所述手柄的所述旋转相反的方向上旋转所述外科器械。15.根据权利要求10所述的外科机器人系统,其中所述控制器还被配置成将所述手柄的所述旋转角度的所述用户输入缩放至所述外科器械的所述旋转角度。16.根据权利要求15所述的外科机器人系统,其中所述外科控制台包括显示器,所述显示器被配置成显示用于选择所述手柄的旋转角度的阈值的用户界面。17.根据权利要求16所述的外科机器人系统,其中所述控制器还被配置成计算缩放因子,以缩放所述手柄的所述旋转角度的所述用户输入。18.一种用于控制外科机器人系统的方法,所述方法包括:致动外科控制台的脚踏板以使所述外科控制台的手柄控制器脱离对外科器械的控制;在所述脚踏板以小于180
°
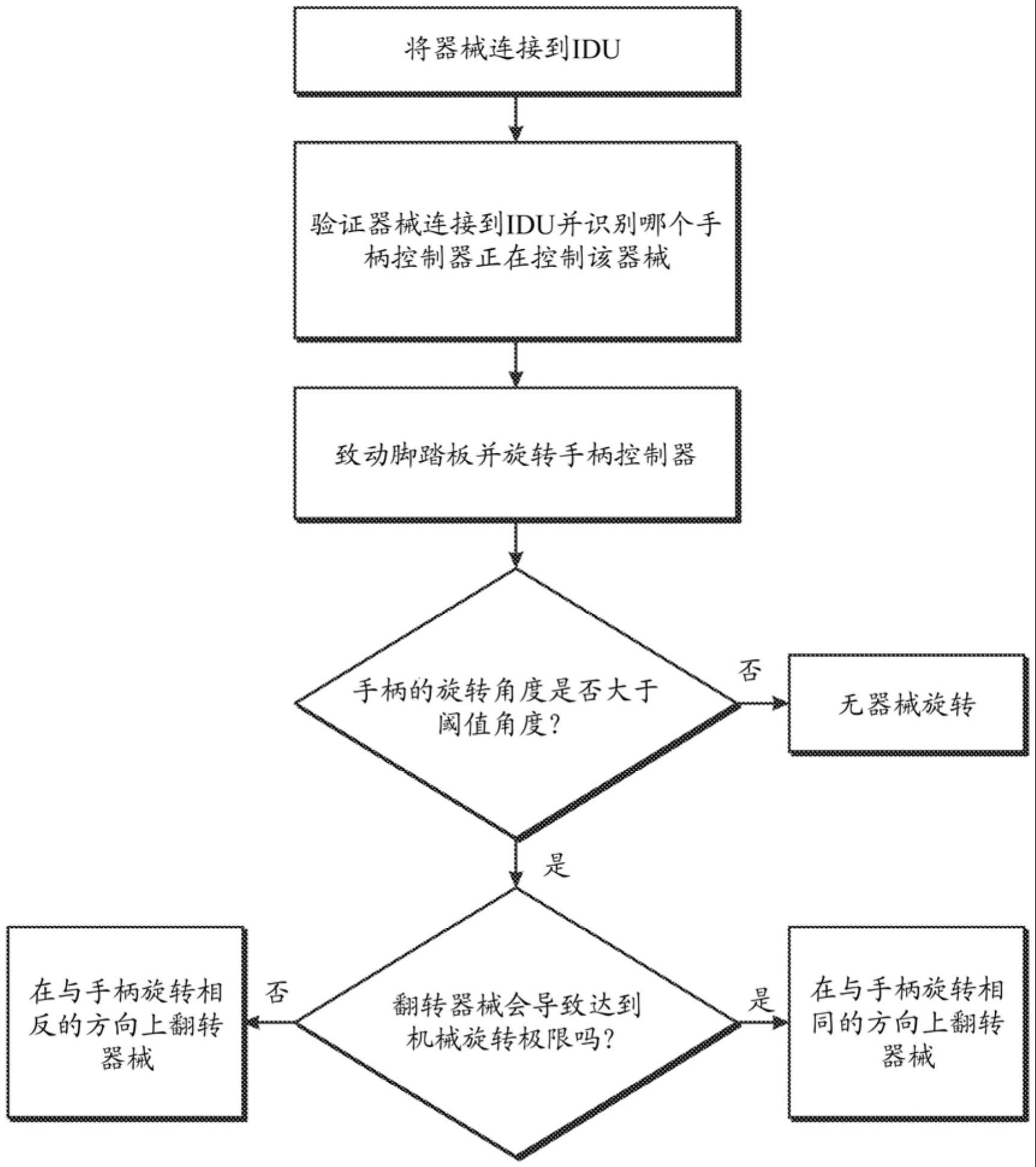
的旋转角度被致动的同时围绕手柄旋转轴线旋转所述手柄控制器的手柄;以及在控制器处确定所述旋转角度是否超过阈值旋转角度;以及响应于所述旋转角度超过所述阈值旋转角度而使所述外科器械绕器械轴线旋转180
°
。19.根据权利要求18所述的方法,其中所述阈值旋转角度为约110
°
至约160
°
。20.根据权利要求18所述的方法,所述方法进一步包括:确定所述外科器械在与所述手柄的旋转相同的方向上的旋转是否会遇到机械极限;以及响应于遇到所述机械极限的确定而在与所述手柄的所述旋转相反的方向上旋转所述外科器械。
技术总结
根据本公开的一个实施方案,外科机器人系统包括机器人臂,该机器人臂具有器械驱动单元和能够由器械驱动单元围绕器械轴线旋转的外科器械。该系统还包括外科控制台,该外科控制台包括至少一个手柄控制器,该至少一个手柄控制器具有能够围绕手柄轴线旋转的手柄并且被配置成接收用于移动外科器械的用户输入。该系统还包括控制器,该控制器被配置成接收用户输入并且响应于用户输入而指示机器人臂翻转外科器械,其中用户输入是手柄围绕手柄轴线的旋转角度,该旋转角度小于外科器械的约180
技术研发人员:马克斯
受保护的技术使用者:柯惠LP公司
技术研发日:2021.07.13
技术公布日:2023/5/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。