技术特征:
1.一种马达控制装置,其在dq轴正交坐标系中通过电流矢量控制来驱动马达,其中,该马达控制装置具有如下单元:求出从dq轴正交坐标平面中的最大效率曲线、电流最小曲线、电压最小曲线、电流限制圆、电压限制椭圆以及恒定扭矩曲线中选择出的2个曲线的交点中的作为电流指令而有效的交点的组合的单元;将所述交点的组合作为当前状态和转变目的地状态而分别在行方向和列方向上进行排列,制成设定了从所述当前状态向所述转变目的地状态的转变条件的状态转变表的单元;以及根据从与所述当前状态对应的任意的交点按照所述转变条件进行了转变时的与所述转变目的地状态对应的交点在所述曲线上的位置关系,生成针对所述马达的电流指令值的单元。2.根据权利要求1所述的马达控制装置,其中,所述状态转变表包含相对于所述曲线不具有有效的交点的状态作为所述当前状态和所述转变目的地状态。3.根据权利要求2所述的马达控制装置,其中,该马达控制装置还具有保护单元,在不具有所述有效的交点的情况下,该保护单元对所述马达至少应用过电流保护和过电压保护中的任一方或双方。4.根据权利要求1所述的马达控制装置,其中,所述状态转变表包含如下转变:第1转变,将所述最大效率曲线与所述恒定扭矩曲线的交点坐标作为所述当前状态,将规定的电流饱和作为所述转变条件,将所述电流限制圆与所述恒定扭矩曲线的交点坐标作为所述转变目的地状态;第2转变,将所述电流限制圆与所述恒定扭矩曲线的交点坐标作为所述当前状态,将规定的扭矩饱和作为所述转变条件,将所述电流最小曲线与所述电流限制圆的交点坐标作为所述转变目的地状态;第3转变,将所述电流最小曲线与所述电流限制圆的交点坐标作为所述当前状态,将规定的扭矩饱和的消除作为所述转变条件,将所述电流限制圆与所述恒定扭矩曲线的交点坐标作为所述转变目的地状态;以及第4转变,将所述电流限制圆与所述恒定扭矩曲线的交点坐标作为所述当前状态,将与所述最大效率曲线的相交状态作为所述转变条件,将所述最大效率曲线与所述恒定扭矩曲线的交点坐标作为所述转变目的地状态。5.根据权利要求1所述的马达控制装置,其中,所述状态转变表包含如下转变:第5转变,将所述最大效率曲线与所述恒定扭矩曲线的交点坐标作为所述当前状态,将规定的电压饱和作为所述转变条件,将所述电压限制椭圆与所述恒定扭矩曲线的交点坐标作为所述转变目的地状态;第6转变,将所述电压限制椭圆与所述恒定扭矩曲线的交点坐标作为所述当前状态,将规定的扭矩饱和作为所述转变条件,将所述电压最小曲线与所述电压限制椭圆的交点坐标作为所述转变目的地状态;
第7转变,将所述电压最小曲线与所述电压限制椭圆的交点坐标作为所述当前状态,将规定的扭矩饱和的消除作为所述转变条件,将所述电压限制椭圆与所述恒定扭矩曲线的交点坐标作为所述转变目的地状态;以及第8转变,将所述电压限制椭圆与所述恒定扭矩曲线的交点坐标作为当前状态,将与所述最大效率曲线的相交状态作为所述转变条件,将所述最大效率曲线与所述恒定扭矩曲线的交点坐标作为所述转变目的地状态。6.根据权利要求1所述的马达控制装置,其中,所述状态转变表包含如下转变:第9转变,将所述最大效率曲线与所述恒定扭矩曲线的交点坐标作为所述当前状态,将规定的电流饱和作为所述转变条件,将所述电流限制圆与所述恒定扭矩曲线的交点坐标作为所述转变目的地状态;第10转变,将所述电流限制圆与所述恒定扭矩曲线的交点坐标作为所述当前状态,将规定的扭矩饱和作为所述转变条件,将所述电压限制椭圆与所述电流限制圆的交点坐标作为所述转变目的地状态;第11转变,将所述电压限制椭圆与所述电流限制圆的交点坐标作为所述当前状态,将满足规定的扭矩饱和的消除和转速作为所述转变条件,将所述电流限制圆与所述恒定扭矩曲线的交点坐标作为所述转变目的地状态;以及第12转变,将所述电流限制圆与所述恒定扭矩曲线的交点坐标作为所述当前状态,将与所述最大效率曲线的相交状态作为所述转变条件,将所述最大效率曲线与所述恒定扭矩曲线的交点坐标作为所述转变目的地状态。7.根据权利要求1所述的马达控制装置,其中,所述状态转变表包含如下转变:第13转变,将所述最大效率曲线与所述恒定扭矩曲线的交点坐标作为所述当前状态,将规定的电压饱和作为所述转变条件,将所述电压限制椭圆与所述恒定扭矩曲线的交点坐标作为所述转变目的地状态;第14转变,将所述电压限制椭圆与所述恒定扭矩曲线的交点坐标作为所述当前状态,将规定的扭矩饱和作为所述转变条件,将所述电压限制椭圆与所述电流限制圆的交点坐标作为所述转变目的地状态;第15转变,将所述电压限制椭圆与所述电流限制圆的交点坐标作为所述当前状态,将满足规定的扭矩饱和的消除和转速作为所述转变条件,将所述电压限制椭圆与所述恒定扭矩曲线的交点坐标作为所述转变目的地状态;以及第16转变,将所述电压限制椭圆与所述恒定扭矩曲线的交点坐标作为所述当前状态,将与所述最大效率曲线的相交状态作为所述转变条件,将所述最大效率曲线与所述恒定扭矩曲线的交点坐标作为所述转变目的地状态。8.根据权利要求1所述的马达控制装置,其中,所述状态转变表包含如下转变:第17转变,将所述电压最小曲线与所述电压限制椭圆的交点坐标作为所述当前状态,将规定的电流饱和作为所述转变条件,将所述电压限制椭圆与所述电流限制圆的交点坐标作为所述转变目的地状态;以及
第18转变,将所述电压限制椭圆与所述电流限制圆的交点坐标作为所述当前状态,将相位比所述电压最小曲线超前作为所述转变条件,将所述电压最小曲线与所述电压限制椭圆的交点坐标作为所述转变目的地状态。9.根据权利要求1所述的马达控制装置,其中,所述状态转变表包含如下转变:第19转变,将所述电流最小曲线与所述电流限制圆的交点坐标作为所述当前状态,将规定的电压饱和作为所述转变条件,将所述电压限制椭圆与所述电流限制圆的交点坐标作为所述转变目的地状态;以及第20转变,将所述电压限制椭圆与所述电流限制圆的交点坐标作为所述当前状态,将相位比所述电流最小曲线滞后作为所述转变条件,将所述电流最小曲线与所述电流限制圆的交点坐标作为所述转变目的地状态。10.根据权利要求2所述的马达控制装置,其中,所述状态转变表包含如下转变:第21转变,将所述电压限制椭圆与所述电流限制圆不具有交点的状态作为所述当前状态,将满足规定的转速作为所述转变条件,将所述电压限制椭圆与所述电流限制圆的交点坐标作为所述转变目的地状态;以及第22转变,将所述电压限制椭圆与所述电流限制圆的交点坐标作为所述当前状态,将满足规定的转速作为所述转变条件,将所述电压限制椭圆与所述电流限制圆不具有交点的状态作为所述转变目的地状态。11.根据权利要求1至10中的任意一项所述的马达控制装置,其中,所述最大效率曲线是使用所述马达的铁损来记述的二次曲线。12.一种马达控制方法,在dq轴正交坐标系中通过电流矢量控制来驱动马达,其中,该马达控制方法具有如下工序:求出从dq轴正交坐标平面中的最大效率曲线、电流最小曲线、电压最小曲线、电流限制圆、电压限制椭圆以及恒定扭矩曲线中选择出的2个曲线的交点中的作为电流指令而有效的交点的组合;将所述交点的组合作为当前状态和转变目的地状态而分别在行方向和列方向上进行排列,制成设定了从所述当前状态向所述转变目的地状态的转变条件的状态转变表;以及根据从与所述当前状态对应的任意的交点按照所述转变条件进行了转变时的与所述转变目的地状态对应的交点在所述曲线上的位置关系,生成针对所述马达的电流指令值。
技术总结
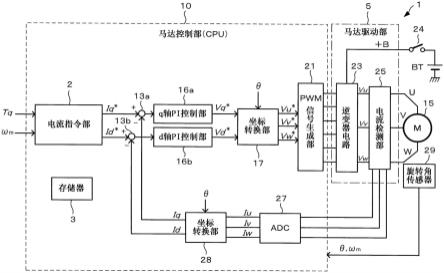
提供一种马达控制装置,其减轻电流指令值的计算量而提高处理速度。求出从在dq轴正交坐标平面上绘制的最大效率曲线、电流最小曲线、电压最小曲线、电流限制圆、电压限制椭圆以及恒定扭矩曲线中选择出的2个曲线的交点中的作为电流指令而有效的交点的组合。然后,将交点的组合作为当前状态和转变目的地状态进行排列,进而制成设定了转变条件的状态转变表,根据从与当前状态对应的任意的交点按照转变条件进行了转变时的与转变目的地状态对应的交点在曲线上的位置关系,生成针对电动马达(15)的电流指令值。的电流指令值。的电流指令值。
技术研发人员:高野祐一 福村友博 大津勇真
受保护的技术使用者:日本电产株式会社
技术研发日:2020.12.15
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。