技术特征:
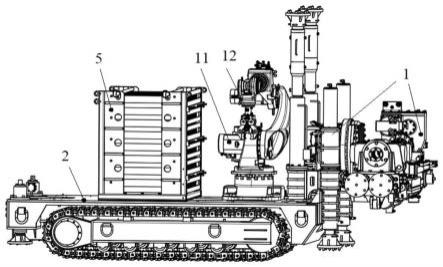
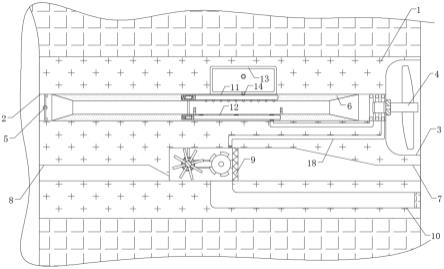
1.一种六轴串联机械手柔顺加卸钻杆系统,其特征在于,包括三自由度主机、杆箱、位于三自由度主机和杆箱之间的六轴串联机械手以及六轴串联机械手末端的钻杆抓取柔顺构件;所述三自由度主机包括给进机身、卸扣器和前夹持器、后夹持器、动力头、给进油缸、拖板、平移油缸、平移卡板、给进位移传感器组件、平移位移传感器组件、变幅稳固装置;所述变幅稳固装置通过举升油缸安装在履带车体平台上,变幅稳固装置的回转支撑连接给进机身一侧;所述平移油缸平移、变幅稳固装置的举升油缸举升及回转支撑旋转能实现主机三个自由度的调节;所述杆箱包括箱体支架、钻杆限位架、挡杆、垫板、前仓门、挡板组件和后仓门;杆箱具有多层、多列容纳钻杆的空间,并通过调整侧面垫板和底面钻杆限位架能适应不同直径的钻杆;所述六轴串联机械手包括底座、臂体和伺服电机;臂体在底座上的旋转角度范围-180
°
~ 180
°
,伺服电机能控制臂体顺序或同步动作,实现末端位置的变化,用于将钻杆从杆箱中抓取到三自由度主机的钻杆放置位置;所述钻杆抓取柔顺构件包括n形架、安装在n形架上的第一油缸、位于第一油缸下方的柔性件和齿轮齿条组以及手爪,还包括弹性组件、接近开关、磁铁和磁性开关组件;所述第一油缸能推动齿轮齿条组带动手爪打开与闭合以抓取钻杆。2.如权利要求1所述的六轴串联机械手柔顺加卸钻杆系统,其特征在于,所述三自由度主机的卸扣器和前夹持器以及后夹持器螺接在给进机身的安装板上,并与动力头配合实现钻杆的自动装卸;动力头与拖板通过销轴连接,拖板与给进油缸的缸筒连接并随给进油缸的缸筒运动,动力头与拖板随着给进油缸的伸出与缩回在给进机身上滑移,实现钻机的下钻与起钻;给进油缸一端连接在给进机身前端,另一端固定在给进机身后端;给进位移传感器组件一端固定在给进机身上,另一端固定在拖板上,实时检测及反馈给进油缸的行程位置;平移油缸一端铰接在给进机身前端,另一端铰接在给进机身后端,缸筒与平移卡板连接,通过平移油缸的伸缩带动给进机身前后移动,调节给进机身与钻孔孔口距离;平移位移传感器组件一端固定在给进机身上,另一端固定在平移卡板上,检测及反馈平移油缸的平移量。3.如权利要求2所述的六轴串联机械手柔顺加卸钻杆系统,其特征在于,所述变幅稳固装置包括立柱油缸滑轨组件、回转支撑、编码器、举升油缸、举升位移传感器组件、立柱下稳固组件和旋转式上稳固组件;所述立柱油缸滑轨组件套装在两个立柱下稳固组件上,立柱油缸滑轨组件的前壁安装回转支撑,回转支撑与给进机身之间通过l形支撑板连接,回转支撑的旋转涡轮能带动l形支撑板及给进机身转动;回转支撑内装有制动件,制动件能对旋转涡轮进行液力制动锁死;编码器通过安装座连接在制动件上,编码器的内轴通过传动轴与l形支撑板连接,实现对钻孔倾角的直接测量;所述举升油缸下端螺接在履带车体平台上,举升油缸上端与立柱油缸滑轨组件的后壁螺接,通过举升油缸的伸缩使给进机身沿立柱油缸运动,实现钻机开孔高度调节;所述举升位移传感器组件一端螺接在立柱油缸滑轨组件上,另一端螺接在履带车体平台上,用以检测及反馈举升油缸的位移量。4.如权利要求3所述的六轴串联机械手柔顺加卸钻杆系统,其特征在于,所述立柱下稳固组件有两个且相互平行,立柱下稳固组件包括下立柱及其内部下方的下顶液压油缸,该下顶液压油缸的活塞杆内设有位移传感器;
所述旋转式上稳固组件有两个且均与立柱下稳固组件平行,旋转式上稳固组件通过其下部的旋转套与立柱下稳固组件连接,旋转式上稳固组件包括上立柱及其内部上方的上顶液压油缸,在旋转式上稳固组件下端设有限位销;运输时旋转式上稳固组件利用限位销与履带车体平台固定,使上稳固组件收回,与车体宽度保持一致;在施工稳固状态时,拔出限位销将两个旋转式上稳固组件均向外旋转90
°
至车体外即立柱下稳固组件两侧以增大稳固间距,提高稳固可靠性;运输时旋转式上稳固组件的上顶液压油缸活塞杆向上和立柱下稳固组件的下顶液压油缸活塞杆向下分别伸出,对钻机进行稳固操作。5.如权利要求1所述的六轴串联机械手柔顺加卸钻杆系统,其特征在于,所述杆箱的箱体支架包括方形底架和四角位置的四个侧板,方形底架包括两条相互平行的侧梁和两条相互平行的端梁,每条侧梁上设有两个竖向的所述侧板以围挡钻杆;钻杆限位架有两个且相互平行并均垂直连接在两个侧梁之间,钻杆限位架上设有等间距排布的弧形槽以码放钻杆保证钻杆按照固定的间距码放排列,钻杆垂直于钻杆限位架放置;挡杆可拆卸设在两个相对的侧板之间并与钻杆限位架平行以防止整箱钻杆运输时震动引起钻杆掉落,钻机工作时将挡杆拆除放到箱体支架后的两组支座通孔内;垫板螺接在侧板上,通过调整垫板厚度及更换钻杆限位架可满足不同直径钻杆并适应不同形式的手抓;前仓门和后仓门平行相对且分别设在两个端梁上方的两个侧板之间,前仓门与挡板组件螺接在一起后再螺接到两个平行相对的侧板上,在钻机工作时从箱体支架上拆除,用以限定钻杆箱内钻杆在钻机行走时轴向限位。6.如权利要求1所述的六轴串联机械手柔顺加卸钻杆系统,其特征在于,所述六轴串联机械手的臂体能以底座为中心水平转动,底座设有0基准;臂体包括依次相连的肩部、大臂、小臂和手腕,肩部下端与底座连接,肩部上端通过伺服电机控制的肩关节与大臂一端连接,大臂另一端通过伺服电机控制的肘关节与小臂一端连接,小臂另一端通过伺服电机控制的腕关节与手腕上部连接,手腕下端连接钻杆抓取柔顺构件。7.如权利要求1所述的六轴串联机械手柔顺加卸钻杆系统,其特征在于,所述钻杆抓取柔顺构件的第一油缸贯穿并安装在n形架的顶板上,第一油缸下端安装柔性件,柔性件的中间轴下部与齿轮齿条组相连;齿轮齿条组包括齿条、安装轴和齿轮;齿条与柔性件的中间轴相连,齿轮套在安装轴上,安装轴设在n形架的两个侧板之间;在安装轴上还设有两个所述手爪以通过第一油缸推动齿轮齿条组运动能实现手爪的开合;磁性开关组件和磁铁安装在n形架下方的两个手爪之间,磁性开关组件中的油缸能控制磁铁是否带有磁性;弹性组件连在磁铁上端和n形架侧壁外之间。8.如权利要求7所述的六轴串联机械手柔顺加卸钻杆系统,其特征在于,所述柔性件包括连接壳体、弹簧、斜楔、关节轴承、上壳体、滑块、下壳体、弹性元件、连接盘和中间轴;所述连接壳体和上壳体之间以及上壳体和下壳体之间均通过螺栓连接;弹簧安装在连接壳体内壁顶部凸起和斜楔上端之间,斜楔安装在上壳体的滑槽内,斜楔下端斜面与滑块的一端的斜面接触且滑块安装在下壳体内上平面上;关节轴承安装在滑块内,关节轴承的外圈与滑块固定,内圈与中间轴一端配合,中间轴的另一端与齿轮齿条组连接;弹性元件通过螺钉固定在连接盘和下壳体内上平面之间,连接盘连在中间轴和弹性元件之间,使中间轴可绕滑块摆动扭动。
9.一种权利要求1至8任一权利要求所述的六轴串联机械手柔顺加卸钻杆系统的加卸钻杆方法,其特征在于,该方法的加杆过程包括以下步骤:步骤a1:初始化六轴串联机械手和三自由度主机,六轴串联机械手、三自由度主机均回到标定零点,卸扣器闭合、后夹持器张开,动力头回到标定位置;步骤a2:防爆遥控器给三自由度主机输入施工目标孔参数;步骤a3:三自由度主机按计算结果运动到指定位置,并将坐标位置反馈给控制器;步骤a4:防爆遥控器发送加杆指令给三自由度主机和六轴串联机械手;步骤a5:三自由度主机等待加杆,六轴串联机械手及其末端的钻杆抓取柔顺构件取杆;步骤a6:六轴串联机械手根据三自由度主机反馈的坐标值,抓取钻杆放入夹持器设定位置;步骤a7:夹持器夹紧,并发送信息给钻杆抓取柔顺构件控制手爪松开;步骤a8:六轴串联机械手运动到指定安全位置,并发送信息给三自由度主机;步骤a9:动力头回转给进至压力达到设定值;步骤a10:通过压力突变判断上扣完成,夹持器松开;步骤a11:动力头回转给进至压力达到设定值;步骤a12:通过压力突变判断上扣完成,卸扣器松开,完成加杆。10.一种权利要求1至8任一权利要求所述的六轴串联机械手柔顺加卸钻杆系统的加卸钻杆方法,其特征在于,该方法的卸杆过程包括以下步骤:步骤b1:六轴串联机械手初始化,同时检测三自由度主机状态,在主动钻杆与钻杆分离、前夹持器夹住钻杆闭合、后夹持器张开的待卸杆状态;步骤b2:动力头给进至标定位置,上后端扣;步骤b3:动力头回转给进,通过压力突变判断上扣完毕后,前夹持器松开;步骤b4:动力头起拔至标定位置,前夹持器夹紧,卸前端扣;步骤b5:动力头回转起拔,通过压力突变判断卸扣完毕后,动力头起拔至标定位置;步骤b6:后夹持器夹紧,卸后端扣;步骤b7:动力头回转起拔,通过压力突变判断卸扣完毕后,动力头起拔至标定位置,发送当前位置坐标给主控制器,同时给六轴串联机械手发送等待卸杆信号;步骤b8:六轴串联机械手及其末端钻杆抓取柔顺构件夹紧钻杆,后夹持器松开,六轴串联机械手将钻杆放入杆箱设定位置,在此过程中六轴串联机械手运动到指定安全位置时发送信息给三自由度主机。
技术总结
本发明公开了一种六轴串联机械手柔顺加卸钻杆系统及加卸钻杆方法,包括三自由度主机、杆箱、位于三自由度主机和杆箱之间的六轴串联机械手以及六轴串联机械手末端的钻杆抓取柔顺构件;六轴串联机械手从杆箱中直接抓取钻杆送到主机指定位置,末端钻杆抓取柔顺构件可实现多自由度和多方向的柔顺控制,在钻杆装卸过程中起到缓冲作用,可使机械臂不受反力,起到保护机械臂的作用,提高其工作寿命。本发明提高钻机施工安全性、钻孔效率和降低劳动强度的同时,更促进了钻探装备技术自动化、智能化的发展。化的发展。化的发展。
技术研发人员:姚亚峰 彭涛 沙翠翠 彭光宇 董洪波 张刚 韩健 汪芸
受保护的技术使用者:中煤科工西安研究院(集团)有限公司
技术研发日:2022.12.06
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。