技术特征:
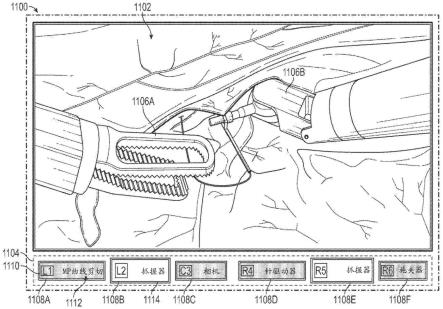
1.一种机器人医疗系统,包括:第一机器人臂;输入装置,所述输入装置被配置成接收用于控制所述第一机器人臂的一个或多个用户输入;显示器,所述显示器被配置成提供与所述机器人医疗系统相关的信息,所述显示器包括表示所述第一机器人臂的第一图标,所述第一图标至少包括第一状态和第二状态;处理器;以及至少一个计算机可读存储器,所述至少一个计算机可读存储器与所述处理器通信并且具有存储在其上的计算机可执行指令,所述计算机可执行指令致使所述处理器:基于在所述输入装置处所接收的所述一个或多个用户输入来控制所述第一机器人臂的运动;在所述第一机器人臂的所述运动期间,确定所述第一机器人臂与所述机器人系统的第二部件之间的距离;以及基于所述距离,将所述第一图标设定为所述第一状态或所述第二状态。2.根据权利要求1所述的系统,其中:所述第一图标的所述第一状态指示所述第一机器人臂与所述第二部件之间的所述距离超过碰撞接近度阈值距离;并且所述第一图标的所述第二状态指示所述第一机器人臂与所述第二部件之间的所述距离小于所述碰撞接近度阈值距离。3.根据权利要求1所述的系统,其中:所述第一图标包括所述第一状态、中间状态和所述第二状态;并且所述计算机可执行指令致使所述处理器基于所述第一机器人臂与所述第二部件之间的所述距离将所述第一图标设定为所述第一状态、所述中间状态或所述第二状态。4.根据权利要求3所述的系统,其中:所述第一图标的所述第一状态指示所述第一机器人臂与所述第二部件之间的所述距离超过第一碰撞接近度阈值距离;所述第一图标的所述中间状态指示所述第一机器人臂与所述第二部件之间的所述距离介于所述第一碰撞接近度阈值距离与第二接近度阈值距离之间;并且所述第一图标的所述第二状态指示所述第一机器人臂与所述第二部件之间的所述距离小于所述第二碰撞接近度阈值距离。5.根据权利要求4所述的系统,其中:在所述第一状态,所述第一图标是静态的;在所述中间状态,所述第一图标逐渐改变以提供所述第一机器人臂与所述第二部件之间的所述距离的指示;并且在所述第二状态,所述第一图标是静态的。6.根据权利要求5所述的系统,其中,在所述中间状态,所述第一图标被配置成通过基于所述第一机器人臂与所述第二部件之间的所述距离逐渐填充或改变所述第一图标的边界的颜色来逐渐改变以提供所述第一机器人臂与所述第二部件之间的所述距离的所述指示。
7.根据权利要求5所述的系统,其中,在所述中间状态,所述第一图标被配置成通过基于所述第一机器人臂与所述第二部件之间的所述距离逐渐改变所述第一图标的不透明度来逐渐改变以提供所述第一机器人臂与所述第二部件之间的所述距离的所述指示。8.根据权利要求4所述的系统,其中:所述第一碰撞接近度阈值距离包括所述第一图标从所述第一状态改变为所述中间状态的触发距离;并且所述第二碰撞接近度阈值距离包括所述第一图标从所述中间状态改变为所述第二状态的截止距离,并且所述第一机器人臂的运动受到限制以防止与所述第二部件碰撞。9.根据权利要求1所述的系统,其中所述第二部件包括以下中的一者:所述机器人医疗系统的第二机器人臂、所述机器人医疗系统的患者平台或所述机器人医疗系统的附件。10.一种机器人医疗系统,包括:第一机器人臂;显示器,所述显示器被配置成提供与所述机器人医疗系统相关的信息,所述显示器包括表示所述第一机器人臂的第一图标,所述第一图标至少包括第一状态和第二状态;处理器;以及至少一个计算机可读存储器,所述至少一个计算机可读存储器与所述处理器通信并且具有存储在其上的计算机可执行指令,所述计算机可执行指令致使所述处理器:检测所述第一机器人臂处于以下状态中的一种状态:近距离碰撞状态,其中所述第一机器人臂与所述机器人医疗系统的第二部件之间的距离介于第一碰撞接近度阈值距离与第二接近度阈值距离之间,以及碰撞状态,其中所述第一机器人臂与所述第二部件之间的所述距离小于所述第二接近度阈值距离;以及在检测到所述第一机器人臂处于所述碰撞状态或所述近距离碰撞状态时,将所述第一图标从所述第一状态转变到所述第二状态。11.根据权利要求10所述的系统,其中:所述第一图标的所述第一状态指示所述第一机器人臂处于无碰撞状态,其中所述第一机器人臂与所述第二部件之间的所述距离大于所述第一接近度阈值距离;并且所述第一图标的所述第二状态指示所述第一机器人臂处于所述碰撞状态。12.根据权利要求11所述的系统,其中:所述第一图标包括所述第一状态、中间状态和所述第二状态;并且所述计算机可执行指令被配置成致使所述处理器:在检测到所述近距离碰撞状态时,将所述第一图标从所述第一状态转变到所述中间状态;以及在检测到所述碰撞状态时,将所述第一图标从所述中间状态转变到所述第二状态。13.根据权利要求12所述的系统,其中所述计算机可执行指令致使所述处理器通过以下操作检测所述第一机器人臂与所述机器人医疗系统的所述第二部件处于所述碰撞状态或所述近距离碰撞状态:确定所述第一机器人臂与所述第二部件之间的所述距离;当所述距离介于所述第一接近度阈值距离与所述第二接近度阈值距离之间时,检测到
所述第一机器人臂处于所述近距离碰撞状态;以及当所述距离小于所述第二接近度阈值距离时检测到所述第一机器人臂处于所述碰撞状态。14.根据权利要求13所述的系统,其中:所述第一碰撞接近度阈值距离包括所述第一图标从所述第一状态改变为所述中间状态的触发距离;并且所述第二碰撞接近度阈值距离包括所述第一图标从所述中间状态改变为所述第二状态并且所述第一机器人臂的运动受到限制以防止与所述第二部件碰撞的截止距离。15.根据权利要求13所述的系统,其中:在所述第一状态,所述第一图标是静态的;在所述中间状态,所述第一图标逐渐改变以提供所述第一机器人臂与所述第二部件之间的所述距离的指示;并且在所述第二状态,所述第一图标是静态的。16.根据权利要求15所述的系统,其中,在所述中间状态,所述第一图标被配置成通过基于所述第一机器人臂与所述第二部件之间的所述距离逐渐填充或改变所述第一图标的边界的颜色来逐渐改变以提供所述第一机器人臂与所述第二部件之间的所述距离的所述指示。17.根据权利要求16所述的系统,其中,在所述中间状态,所述第一图标被配置成通过基于所述第一机器人臂与所述第二部件之间的所述距离逐渐改变所述第一图标的不透明度来逐渐改变以提供所述第一机器人臂与所述第二部件之间的所述距离的所述指示。18.根据权利要求10所述的系统,其中所述第二部件包括以下中的一者:所述机器人医疗系统的第二机器人臂、所述机器人医疗系统的患者平台或所述机器人医疗系统的附件。19.根据权利要求10所述的系统,其中:所述至少一个计算机可读存储器存储所述机器人医疗系统的至少所述第一机器人臂和所述第二部件的计算机模型;并且所述计算机可执行指令致使所述处理器基于所述计算机模型检测所述第一机器人臂与所述机器人医疗系统的所述第二部件处于所述碰撞状态或所述近距离碰撞状态。20.一种用于指示机器人医疗系统的第一机器人臂与第二部件之间的碰撞的方法,所述方法包括:在显示器上提供指示所述第一机器人臂的第一图标;确定所述第一机器人臂与所述第二部件之间的距离;基于所确定的距离更新所述第一图标的状态,其中所述第一图标的所述状态包括以下中的一者:指示所述距离超过第一接近度阈值距离的第一状态;以及指示所述距离小于所述第一接近度阈值距离的第二状态。
技术总结
提供了用于碰撞检测和避免的系统和方法。在一个方面,一种机器人医疗系统包括:第一机器人臂;输入装置,该输入装置被配置成接收用于控制该第一机器人臂的一个或多个用户输入;和显示器,该显示器被配置成提供与该机器人医疗系统相关的信息。该显示器包括第一图标,该第一图标表示该第一机器人臂并且至少包括第一状态和第二状态。该机器人医疗系统还包括处理器和存储器,该存储器具有存储在其上的计算机可执行指令,该计算机可执行指令致使该处理器:基于在该输入装置处实时接收的该一个或多个用户输入来控制该第一机器人臂的运动;确定该第一机器人臂与第二部件之间的距离;以及基于该距离将该第一图标设定为该第一状态或该第二状态。第二状态。第二状态。
技术研发人员:R
受保护的技术使用者:奥瑞斯健康公司
技术研发日:2021.06.23
技术公布日:2023/3/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。