技术特征:
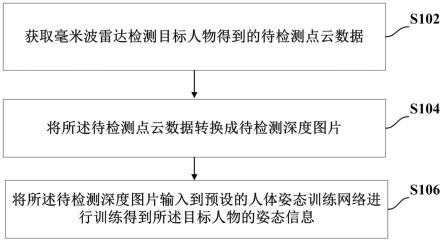
1.一种毫米波人体智能姿态检测方法,其特征在于,所述毫米波人体智能姿态检测方法包括:获取毫米波雷达检测目标人物得到的待检测点云数据;将所述待检测点云数据转换成待检测深度图片;将所述待检测深度图片输入到预设的人体姿态训练网络进行训练得到所述目标人物的姿态信息,所述预设的人体姿态训练网络利用人体姿态训练网络的训练方法进行训练得到,其中,所述人体姿态训练网络的训练方法包括:获取毫米波雷达和摄像机采集的若干对样本点云数据和样本图片,每一对样本点云数据和样本图片为所述毫米波雷达和所述摄像机在同一视场角下同时对一个人物对象进行采集得到;将所述若干对样本点云数据和样本图片中的样本点云数据转换为若干深度图片;利用预设的人体姿态检测模型对所述若干对样本点云数据和样本图片中样本图片进行姿态检测得到对应的人物对象的姿态信息;根据所述姿态信息生成对应的深度图片的标签;将所述若干深度图片和对应标签依序输入到初始人体姿态网络中进行训练得到所述预设的人体姿态训练网络。2.如权利要求1所述的毫米波人体智能姿态检测方法,其特征在于,将所述待检测点云数据转换成待检测深度图片具体包括:获取的摄像机的内参矩阵;以及利用预设空间转换算法和所述内参矩阵将所述待检测点云数据的点坐标进行空间转换得到相应的深度图片。3.如权利要求2所述的毫米波人体智能姿态检测方法,其特征在于,所述预设转换算法为:其中,u表示深度图片像素所在的横向坐标,v表示深度图片像素所在的纵向坐标,k表示采集数据所用的摄像机的内参矩阵,fx表示焦距乘上图像坐标系到像素坐标系之间的横向缩放比例,fy表示焦距乘上图像坐标系到像素坐标系之间的纵向缩放比例,cx表示图像坐标系在缩放为像素坐标系之后,原点位置距离左上角的横向距离,cy表示图像坐标系在缩放为像素坐标系之后,原点位置距离左上角的纵向距离。)p表示点云数据的三维空间点,x表示三维空间点的横向坐标,y表示三维空间点的纵向坐标,z表示三维空间点的深度。4.如权利要求1所述的毫米波人体智能姿态检测方法,其特征在于,初始人体姿态网络采用encoder-decoder模式建立,所述目标人物的姿态信息由若干关节热图拼接而成的姿态热图片,每张热图对应一个关节,所述各关节在所述姿态热图片中通过连线连接。5.如权利要求4所述的毫米波人体智能姿态检测方法,其特征在于,所述关节热图包括目标人物的鼻子、左右眼睛、左右耳朵、左右肩、胸骨、左右肘部、左右腕部、左右膝部、左右臀部、左右脚踝。
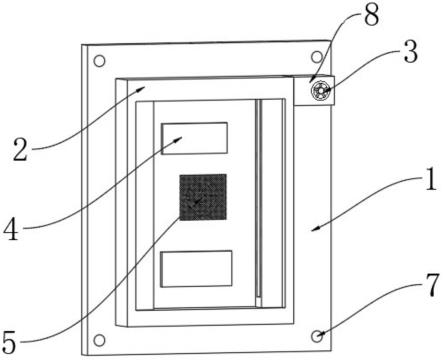
6.如权利要求1所述的毫米波人体智能姿态检测方法,其特征在于,所述目标人物的姿态信息表示所述目标人物的高度。7.一种毫米波人体智能姿态检测装置,其特征在于,所述毫米波人体智能姿态检测装置包括:计算机可读存储介质,用于存储程序指令;以及处理器执行所述程序指令以实现如权利要求1至6中任一项所述的毫米波人体智能姿态检测方法。8.一种毫米波人体智能姿态检测设备,所述毫米波人体智能姿态检测设备包括壳体、设置于所述壳体的毫米波雷达以及如权利要求7所述的毫米波人体智能姿态检测装置。9.一种毫米波人体智能姿态检测系统,包括:毫米波雷达,用于对目标人物进行检测得到待检测点云数据;毫米波人体智能姿态检测装置,与所述毫米波雷达通讯连接,所述毫米波人体智能姿态检测装置包括:存储器,用于存储程序指令;处理器执行所述程序指令以实现如权利要求1至6中任一项所述的毫米波人体智能姿态检测方法。10.如权利要求9所述的一种毫米波人体智能姿态检测系统,所述毫米波人体智能姿态检测系统还包括:电子设备,所述电子设备根据所述所述目标人物的姿态信息执行相应的操作。
技术总结
本申请提供了一种毫米波人体智能姿态检测方法,包括:获取毫米波雷达检测目标人物得到待检测点云数据;将所述待检测点云数据转换成待检测深度图片;将所述待检测深度图片输入到预设的人体姿态训练网络进行训练得到所述目标人物的姿态信息。本申请还提供了毫米波人体智能姿态检测装置、毫米波人体智能姿态检测设备及毫米波人体智能姿态检测系统。本申请技术方案能够更加安全智能的对目标人物进行姿态检测。态检测。态检测。
技术研发人员:张远 李伟 吴超 蒋彦波
受保护的技术使用者:深圳电目科技有限公司
技术研发日:2022.07.28
技术公布日:2022/12/1
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。