技术特征:
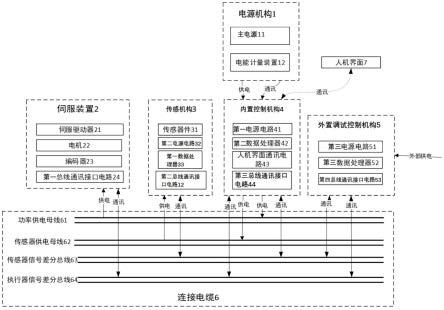
1.一种可扩展的外骨骼机器人控制系统,其特征在于,包括:电源机构;伺服装置,所述伺服装置用于控制外骨骼机器人运动,所述电源机构能够为所述伺服装置供电;传感机构,所述传感机构设于所述外骨骼机器人上,所述传感机构能够采集所述外骨骼机器人的运动状态信息;内置控制机构,所述内置控制机构设于所述外骨骼机器人内,所述内置控制机构与所述传感机构和所述伺服装置连接,所述内置控制机构能够根据所述传感机构采集到的信息控制所述伺服装置;外置调试控制机构,所述外置调试控制机构与所述传感机构和所述内置控制机构连接,所述外置调试控制机构能够接收所述传感机构采集到的信息,且所述外置调试控制机构能够控制所述内置控制机构。2.根据权利要求1所述的一种可扩展的外骨骼机器人控制系统,其特征在于,还包括连接电缆,所述连接电缆包括功率供电母线、传感器供电母线、传感器信号差分总线和执行器信号差分总线;其中,所述功率供电母线用于为所述伺服装置供电;所述传感器供电母线用于为所述传感机构供电,所述传感器信号差分总线用于在所述控制系统中交换所述传感机构采集到的信息,所述执行器信号差分总线用于在所述控制系统中交换所述伺服装置的工作信息。3.根据权利要求2所述的一种可扩展的外骨骼机器人控制系统,其特征在于,所述电源机构包括主电源和电能计量装置,所述主电源通过嵌入式电源电路为所述功率供电母线和所述传感器供电母线供电,所述电能计量装置能够测量所述主电源的能耗信息。4.根据权利要求3所述的一种可扩展的外骨骼机器人控制系统,其特征在于,还包括人机界面,所述人机界面与所述内置控制机构连接,通过所述人机界面能够控制所述内置控制机构。5.根据权利要求4所述的一种可扩展的外骨骼机器人控制系统,其特征在于,所述内置控制机构包括第一电源电路、第二数据处理器、人机界面通讯电路和第三总线通讯接口电路;所述第一电源电路与所述第二数据处理器、所述人机界面通讯电路、所述第三总线通讯接口电路、所述主电源、所述功率供电母线和传感器供电母线连接,所述第一电源电路能够将所述主电源的供电电压转换为所述功率供电母线和所述传感器供电母线所需要的电压,所述第一电源电路能够为所述第二数据处理器、所述人机界面通讯电路和所述第三总线通讯接口电路供电;所述第二数据处理器通过人机界面通讯电路与所述人机界面通讯,所述第二数据处理器通过所述第三总线通讯接口电路与所述传感机构通讯。6.根据权利要求5所述的一种可扩展的外骨骼机器人控制系统,其特征在于,所述伺服装置包含伺服驱动器、电机、编码器、第一总线通讯接口电路;所述伺服驱动器能够通过所述编码器获取所述电机的转子位置信息并驱动所述电机输出转矩,所述伺服驱动器能够通过所述第一总线通讯接口电路接收所述内置控制机构或所述外置调试控制机构的转矩指令,所述伺服驱动器将所述电机的转子位置信息、速度信
息和电流信息至所述执行器信号差分总线。7.根据权利要求4所述的一种可扩展的外骨骼机器人控制系统,其特征在于,所述传感机构包括传感器件、第二电源电路、第一数据处理器和第二总线通讯接口电路;所述第二电源电路用于为所述传感器件供电,所述传感器件将电信号传输至所述第一数据处理器中,所述第一数据处理器能够将所述传感器件采集到的信号进行编码,并通过所述第二总线通讯接口电路发送至所述传感器信号差分总线中。8.根据权利要求6所述的一种可扩展的外骨骼机器人控制系统,其特征在于,所述外置调试控制机构包含第三电源电路、第三数据处理器、第四总线通讯接口电路;所述第三电源电路从外部供电获取电能,并为所述第三数据处理器供电,所述第三数据处理器能够通过所述第四总线通讯接口电路与所述传感器信号差分总线、所述执行器信号差分总线交换信息。9.根据权利要求7所述的一种可扩展的外骨骼机器人控制系统,其特征在于,所述传感器件为力矩传感器、力传感器、姿态传感器、加速度传感器、测距传感器、角度传感器和位移传感器之中的一种或多种。10.根据权利要求5所述的一种可扩展的外骨骼机器人控制系统,其特征在于,所述人机界面包括可视化屏幕和人机输入接口,所述可视化屏幕和所述人机输入接口均与所述第二数据处理器连接。
技术总结
本实用新型提供一种可扩展的外骨骼机器人控制系统,涉及外骨骼控制领域,包括:电源机构;伺服装置,伺服装置用于控制外骨骼机器人运动,电源机构能够为伺服装置供电;传感机构,传感机构设于外骨骼机器人上;内置控制机构,内置控制机构设于外骨骼机器人内,内置控制机构能够根据传感机构采集到的信息控制伺服装置;外置调试控制机构,外置调试控制机构与传感机构和内置控制机构连接,外置调试控制机构能够接收传感机构采集到的信息,且外置调试控制机构能够控制内置控制机构,保证外骨骼机器人电子控制系统迭代设计过程保持高效高性价比,即使在内置集成控制器陷入死机故障时,仍然能够完成包括运动控制在内的基础任务。然能够完成包括运动控制在内的基础任务。然能够完成包括运动控制在内的基础任务。
技术研发人员:黄浩 高旭 方略 罗金龙
受保护的技术使用者:上海微电机研究所(中国电子科技集团公司第二十一研究所)
技术研发日:2022.09.30
技术公布日:2023/3/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。