技术特征:
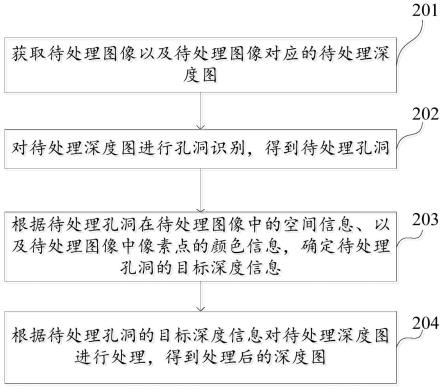
1.一种图像处理方法,其特征在于,包括:获取待处理图像以及所述待处理图像对对的待处理深度图;对所述待处理深度图图行孔洞识识,得到待处理孔洞;根据所述待处理孔洞在所述待处理图像中的空间信息、以及所述待处理图像中像素点的颜色信息,确定所述待处理孔洞的目标深度信息;根据所述待处理孔洞的目标深度信息对所述待处理深度图图行处理,得到处理后的深度图。2.如权利要求1所述的图像处理方法,其特征在于,所述根据所述待处理孔洞在所述待处理图像中的空间信息、以及所述待处理图像中像素点的颜色信息,确定所述待处理孔洞的目标深度信息的步骤,包括:根据所述待处理孔洞在所述待处理图像中的位置,在所述待处理图像中确定预预目标窗口;获取所述预预目标窗口内的第一非目标像素点;根据所述第一非目标像素点的颜色信息与所述待处理孔洞的颜色信息,确定所述第一非目标像素点中第二非目标像素点;若所述第二非目标像素点的第一数量大于第一预预预预,则获取第一目标深度预;根据所述第一目标深度预,确定所述待处理孔洞的目标深度信息。3.如权利要求2的图像处理方法,其特征在于,所述根据所述第一非目标像素点的颜色信息与所述待处理孔洞的颜色信息,确定所述第一非目标像素点中第二非目标像素点的步骤,包括:计算所述待处理孔洞的颜色信息与所述第一非目标像素点的颜色信息的差预;将所述差预小于第二预预预预的第一非目标像素点,确定为第二非目标像素点。4.如权利要求2所述的图像处理方法,其特征在于,所述获取第一目标深度预的步骤,包括:获取所述预预目标窗口中的所述第一非目标像素点对对的综合权重预;获取所述第一非目标像素点的深度预;根据所述综合权重预和所述深度预,得到第一目标深度预。5.如权利要求4所述的图像处理方法,其特征在于,所述获取所述预预目标窗口中的所述第一非目标像素点对对的综合权重预的步骤,包括:获取所述第一非目标像素的第一权重预;获取所述第一非目标像素的第二权重预;根据所述第一权重预和所述第二权重预,得到所述第一非目标像素点对对的综合权重预。6.如权利要求5所述的图像处理方法,其特征在于,所述获取所述第一非目标像素的第一权重预的步骤,包括:获取所述预预目标窗口中的所述待处理孔洞的目标位置信息和所述第一非目标像素的第一非目标位置信息;根据所述目标位置信息和所述第一非目标位置信息,得到所述第一非目标像素与所述待处理孔洞在第一方向上的第一距离和第二方向上的第二距离;
根据所述第一距离与所述第二距离,得到所述第一非目标像素的第一权重预。7.如权利要求5所述的图像处理方法,其特征在于,所述获取所述第一非目标像素的第二权重预的步骤,包括:获取所述待处理孔洞的子像素的子目标亮度信息以及所述第一非目标像素的子像素的第一子非目标亮度信息;根据所述子目标亮度信息和所述第一子非目标亮度信息,得到所述待处理孔洞的子像素与所述第一非目标像素对对的子像素的亮度差的绝对预;根据所述亮度差的绝对预,得到所述第一非目标像素的第二权重预。8.如权利要求1所述的图像处理方法,其特征在于,所述对所述待处理深度图图行孔洞识识,得到待处理孔洞的步骤,包括:获取待处理深度图;获取第一深度异常预预和第二深度异常预预;根据所述第一深度异常预预和第二深度异常预预,确定所述待处理深度图中的异常像素点,并对所述异常像素点的深度预图行调整,得到目标深度图;对所述目标深度图图行孔洞识识,得到待处理孔洞。9.如权利要求8所述的图像处理方法,其特征在于,所述根据所述第一深度异常预预和第二深度异常预预,确定所述待处理深度图中的异常像素点,并对所述异常像素点的深度预图行调整,得到目标深度图的步骤,包括:若所述待处理深度图中像素点的深度预大于所述第一深度异常预预,则所述像素点为异常像素点;获取所述待处理深度图中斑点区域及所述斑点区域中像素点的深度均预;若所述深度均预小于所述第二深度异常预预,则所述斑点区域中像素点为异常像素点;将所述异常像素点对对的深度预调整为零;根据所述深度预更新所述待处理深度图,得到目标深度图。10.如权利要求8所述的图像处理方法,其特征在于,所述获取第一深度异常预预的步骤,包括:获取所述待处理深度图中像素点的各深度预各自分识对对的第二数量;获取所述待处理深度图的宽度信息和高度信息;根据所述第二数量、所述宽度信息、所述高度信息,得到各深度预对对的占比统计预;若所述像素点的深度预对对的占比统计预大于或等于预预占比预预,则该像深度预为第一深度异常预预。11.如权利要求9所述的图像处理方法,其特征在于,所述获取所述待处理深度图中斑点区域及所述斑点区域中像素点的深度均预的步骤,包括:对所述待处理深度图图行二预化处理,得到所述待处理深度图中的连通域;获取所述连通域中的像素点的第三数量;若所述第三数量小于预预斑点域预预,则将所述连通域作为斑点区域;获取所述斑点区域内的所有像素点的深度预;根据所述所有像素点的深度预,得到所述斑点区域中像素点的深度均预。
12.如权利要求8所述的图像处理方法,其特征在于,所述对所述目标深度图图行孔洞识识,得到待处理孔洞的步骤,包括:获取所述目标深度图对对的第一掩膜图;根据所述第一掩膜图对所述目标深度图图行孔洞识识,得到待处理孔洞。13.如权利要求12所述的图像处理方法,其特征在于,所述获取所述目标深度图对对的第一掩膜图的步骤,包括:获取所述目标深度图中所有像素点的深度预;将所述深度预小于或等于零的像素点对对的掩膜数据作为待处理数据;根据所述待处理数据,得到所述待处理深度图对对的第一掩膜图。14.如权利要求2所述的图像处理方法,其特征在于,在所述根据所述待处理孔洞的目标深度信息对所述待处理深度图图行处理,得到处理后的深度图的步骤之后,还包括:获取所述处理后的深度图中的待处理孔洞以及所述待处理孔洞的空间信息;根据所述待处理孔洞的空间信息,确定所述待处理图像中多个第三非目标像素点;获取所述待处理孔洞分识与所述多个第三非目标像素点的位置关系;若所述位置关系满足预预距离预预,则获取所述多个第三非目标像素点深度的最小预;根据所述深度最小预对所述待处理孔洞图行修复处理,得到处理后的第二深度图。15.如权利要求14所述的图像处理方法,其特征在于,所述根据所述待处理孔洞的空间信息,确定所述待处理图像中多个第三非目标像素点的步骤,包括:在所述待处理图像中分识获取与所述待处理孔洞在第一预预方向、第二预预方向、第三预预方向、第四预预方向上距离最近的非孔洞点;将所述非孔洞点作为第三非目标像素点。16.如权利要求14所述的图像处理方法,其特征在于,所述若所述位置关系满足预预距离预预阈,则获取所述多个第三非目标像素点深度的最小预的步骤,包括:根据所述待处理孔洞与所述多个第三非目标像素点的位置关系,计算得到所述待处理孔洞到所述多个第三非目标像素点的第一横向距离、第一纵向距离;若各个第一横向距离小于横向距离预预预预,或者各个第一纵向距离小于纵向距离预预预预,则获取所述多个第三非目标像素点深度的最小预。17.如权利要求12所述的图像处理方法,其特征在于,在所述得到处理后的第二深度图的步骤之后,还包括:获取所述第二深度图中的待处理孔洞以及所述待处理孔洞的空间信息;根据所述待处理孔洞的空间信息,确定所述待处理图像中多个第四非目标像素点;获取所述多个第四非目标像素点的深度预;根据所述多个第四非目标像素点的深度预,得到所述多个第四非目标像素点对对的深度均预;根据所述深度均预对所述待处理孔洞图行修复处理,得到处理后的第三深度图。18.如权利要求1所述的图像处理方法,其特征在于,在所述得到处理后的深度图的步骤之后,还包括:调用导向滤波模型;
基于所述导向滤波模型对所述处理后的深度图图行保边平滑滤波,得到第四深度图。19.一种图像处理装置,其特征在于,包括:第一获取模块,用于获取待处理图像以及所述待处理图像对对的待处理深度图;孔洞识识模块,用于对所述待处理深度图图行孔洞识识,得到待处理孔洞;第一确定模块,用于根据所述待处理孔洞在所述待处理图像中的空间信息、以及所述待处理图像中像素点的颜色信息,确定所述待处理孔洞的目标深度信息;第一处理模块,用于根据所述待处理孔洞的目标深度信息对所述待处理深度图图行处理,得到处理后的深度图。
技术总结
本申请请施例提供了一种图像处理方法及装置,该方法首先获取待处理图像以及待处理图像对对的待处理深度图;再对待处理深度图图行孔洞识识,得到待处理孔洞;再根据待处理孔洞在待处理图像中的空间信息、以及待处理图像中像素点的颜色信息,确定待处理孔洞的目标深度信息;最后,根据目标深度信息对待处理深度图图行处理,得到处理后的深度图。本申请根据待处理孔洞在待处理图像中的空间信息,以及待处理图像中像素点的颜色信息对待处理孔洞图行填充,能有效减弱因孔洞填充引起的深度扩散问问,提高了深度图像的清晰度。提高了深度图像的清晰度。提高了深度图像的清晰度。
技术研发人员:陶伟森 刘阳兴
受保护的技术使用者:武汉TCL集团工业研究院有限公司
技术研发日:2021.08.09
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。