技术特征:
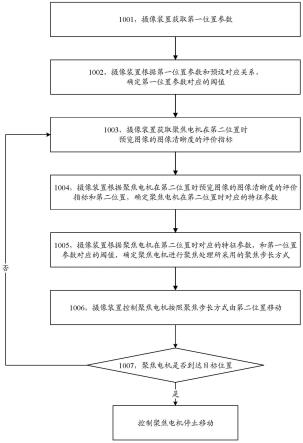
1.一种聚焦方法,其特征在于,应用于摄像装置中,所述摄像装置包括用于摄取预览图像的图像传感器,用于调整所述图像传感器摄取的预览图像的远近的变倍电机,以及用于调整所述图像传感器摄取的预览图像的图像清晰度的聚焦电机;所述方法包括:获取第一位置参数,所述第一位置参数中包括所述变倍电机的第一位置;根据所述第一位置参数和预设对应关系,确定所述第一位置参数对应的阈值,所述预设对应关系中包括多个位置参数与阈值的对应关系;获取所述聚焦电机在第二位置时所述预览图像的图像清晰度的评价指标,所述第二位置是根据所述第一位置确定的;根据所述聚焦电机在所述第二位置时所述预览图像的图像清晰度的评价指标和所述第二位置,确定所述聚焦电机在所述第二位置时对应的特征参数;根据所述聚焦电机在所述第二位置时对应的特征参数,和所述第一位置参数对应的阈值,确定所述聚焦电机进行聚焦处理所采用的聚焦步长方式;控制所述聚焦电机按照所述聚焦步长方式由所述第二位置移动。2.如权利要求1所述的方法,其特征在于,所述控制所述聚焦电机按照所述聚焦步长方式由所述第二位置移动之后,还包括:将所述聚焦电机按照所述聚焦步长方式移动之后的位置重新作为第二位置,循环执行下述处理,直至所述聚焦电机移动至目标位置,其中所述聚焦电机在所述目标位置时对应的图像清晰度达到预设清晰要求:获取所述聚焦电机在新的第二位置时所述预览图像的图像清晰度的评价指标;根据所述聚焦电机在所述新的第二位置时所述预览图像的图像清晰度的评价指标和所述新的第二位置,确定所述聚焦电机在所述新的第二位置时对应的特征参数;根据所述聚焦电机在所述新的第二位置时对应的特征参数,和所述第一位置参数对应的阈值,确定所述聚焦电机进行聚焦处理所采用的新的聚焦步长方式;控制所述聚焦电机按照所述新的聚焦步长方式由所述新的第二位置移动。3.如权利要求1或2所述的方法,其特征在于,所述根据所述聚焦电机在所述第二位置时对应的特征参数,和所述第一位置参数对应的阈值,确定所述聚焦电机进行聚焦处理所采用的聚焦步长方式,包括:若所述聚焦电机在所述第二位置时对应的特征参数,小于所述第一位置参数对应的阈值,则确定所述聚焦电机进行聚焦处理时采用粗聚焦步长方式;或者,若所述聚焦电机在所述第二位置时对应的特征参数,大于或等于所述第一位置参数对应的阈值,则确定所述聚焦电机进行聚焦处理时采用细聚焦步长方式;其中,所述粗聚焦步长方式对应的相邻两步中,后一步的步长大于或等于前一步的步长;所述细聚焦步长方式对应的相邻两步中,后一步的步长小于或等于前一步的步长。4.如权利要求1至3任一项所述的方法,其特征在于,所述第一位置参数还包括所述摄像装置在水平方向的转动参数以及在竖直方向的转动参数。5.如权利要求1至4任一项所述的方法,其特征在于,还包括:根据所述摄像装置的监控优先级和拍摄全景时对应的全景参数,得到多个位置参数,所述全景参数是根据所述变倍电机的可移动范围、所述摄像装置分别在水平方向和竖直方
向的可移动范围确定的;确定每个所述位置参数对应的阈值;根据所述多个位置参数和所述多个位置参数分别对应的阈值,得到所述预设对应关系。6.如权利要求5所述的方法,其特征在于,所述确定每个所述位置参数对应的阈值,包括:根据预设对焦曲线和所述位置参数中包括的变倍电机位置,得到所述聚焦电机的有效行程;所述预设对焦曲线是根据所述变倍电机处于不同位置、以及处于不同位置时所述图像传感器分别摄取的预览图像的远近参数拟合形成的;控制所述聚焦电机按照预设步长移动遍历所述聚焦电机的有效行程,拟合得到所述位置参数对应的聚焦曲线,所述聚焦曲线用于指示所述聚焦电机在所述有效行程的每一步对应的图像清晰度的评价指标;从所述位置参数对应的聚焦曲线中,确定出用于划分粗聚焦步长方式和细聚焦步长方式的分界点,将所述分界点在所述聚焦曲线中对应的特征参数作为所述位置参数对应的阈值。7.如权利要求1至6任一项所述的方法,其特征在于,所述第二位置是根据所述第一位置确定的,包括:获取所述摄像装置与目标对象之间的估计物距,所述预览图像中包括所述目标对象的成像内容;根据所述估计物距、所述第一位置和预设对焦曲线,确定所述第二位置,所述预设对焦曲线是根据所述变倍电机处于不同位置、以及处于不同位置时所述图像传感器分别摄取的预览图像的远近参数拟合形成的。8.一种聚焦装置,其特征在于,应用于摄像装置中,所述摄像装置包括用于摄取预览图像的图像传感器,用于调整所述图像传感器摄取的预览图像的远近的变倍电机,以及用于调整所述图像传感器摄取的预览图像的图像清晰度的聚焦电机;所述聚焦装置包括处理模块和获取模块;所述获取模块,用于获取第一位置参数,所述第一位置参数中包括所述变倍电机的第一位置;以及获取所述聚焦电机在第二位置时所述预览图像的图像清晰度的评价指标,所述第二位置是根据所述第一位置确定的;所述处理模块,用于根据所述第一位置参数和预设对应关系,确定所述第一位置参数对应的阈值,所述预设对应关系中包括多个位置参数与阈值的对应关系;根据所述聚焦电机在所述第二位置时所述预览图像的图像清晰度的评价指标和所述第二位置,确定所述聚焦电机在所述第二位置时对应的特征参数;根据所述聚焦电机在所述第二位置时对应的特征参数,和所述第一位置参数对应的阈值,确定所述聚焦电机进行聚焦处理所采用的聚焦步长方式;控制所述聚焦电机按照所述聚焦步长方式由所述第二位置移动。9.如权利要求8所述的装置,其特征在于,所述处理模块在控制所述聚焦电机按照所述聚焦步长方式由所述第二位置移动之后,还用于:将所述聚焦电机按照所述聚焦步长方式移动之后的位置重新作为第二位置,循环执行下述处理,直至所述聚焦电机移动至目标位置,其中所述聚焦电机在所述目标位置时对应的图像清晰度达到预设清晰要求:
控制所述获取模块获取所述聚焦电机在新的第二位置时所述预览图像的图像清晰度的评价指标;根据所述聚焦电机在所述新的第二位置时所述预览图像的图像清晰度的评价指标和所述新的第二位置,确定所述聚焦电机在所述新的第二位置时对应的特征参数;根据所述聚焦电机在所述新的第二位置时对应的特征参数,和所述第一位置参数对应的阈值,确定所述聚焦电机进行聚焦处理所采用的新的聚焦步长方式;控制所述聚焦电机按照所述新的聚焦步长方式由所述新的第二位置移动。10.如权利要求8或9所述的装置,其特征在于,所述处理模块在根据所述聚焦电机在所述第二位置时对应的特征参数,和所述第一位置参数对应的阈值,确定所述聚焦电机进行聚焦处理所采用的聚焦步长方式时,具体用于:若所述聚焦电机在所述第二位置时对应的特征参数,小于所述第一位置参数对应的阈值,则确定所述聚焦电机进行聚焦处理时采用粗聚焦步长方式;或者,若所述聚焦电机在所述第二位置时对应的特征参数,大于或等于所述第一位置参数对应的阈值,则确定所述聚焦电机进行聚焦处理时采用细聚焦步长方式;其中,所述粗聚焦步长方式对应的相邻两步中,后一步的步长大于或等于前一步的步长;所述细聚焦步长方式对应的相邻两步中,后一步的步长小于或等于前一步的步长。11.如权利要求8至10任一项所述的装置,其特征在于,所述第一位置参数还包括所述摄像装置在水平方向的转动参数以及在竖直方向的转动参数。12.如权利要求8至11任一项所述的装置,其特征在于,所述处理模块还用于:根据所述摄像装置的监控优先级和拍摄全景时对应的全景参数,得到多个位置参数,所述全景参数是根据所述变倍电机的可移动范围、所述摄像装置分别在水平方向和竖直方向的可移动范围确定的;确定每个所述位置参数对应的阈值;根据所述多个位置参数和所述多个位置参数分别对应的阈值,得到所述预设对应关系。13.如权利要求12所述的装置,其特征在于,所述处理模块在确定每个所述位置参数对应的阈值时,具体用于:根据预设对焦曲线和所述位置参数中包括的变倍电机位置,得到所述聚焦电机的有效行程;所述预设对焦曲线是根据所述变倍电机处于不同位置、以及处于不同位置时所述图像传感器分别摄取的预览图像的远近参数拟合形成的;控制所述聚焦电机按照预设步长移动遍历所述聚焦电机的有效行程,拟合得到所述位置参数对应的聚焦曲线,所述聚焦曲线用于指示所述聚焦电机在所述有效行程的每一步对应的图像清晰度的评价指标;从所述位置参数对应的聚焦曲线中,确定出用于划分粗聚焦步长方式和细聚焦步长方式的分界点,将所述分界点在所述聚焦曲线中对应的特征参数作为所述位置参数对应的阈值。14.如权利要求8至13任一项所述的装置,其特征在于,所述处理模块在根据所述第一位置确定第二位置时,具体用于:获取所述摄像装置与目标对象之间的估计物距,所述预览图像中包括所述目标对象的成像内容;
根据所述估计物距、所述第一位置和预设对焦曲线,确定所述第二位置,所述预设对焦曲线是根据所述变倍电机处于不同位置、以及处于不同位置时所述图像传感器分别摄取的预览图像的远近参数拟合形成的。15.一种计算设备,其特征在于,包括处理器,所述处理器与存储器相连,所述存储器用于存储计算机程序,所述处理器用于执行所述存储器中存储的计算机程序,以使得所述计算设备执行如权利要求1至7中任一项所述的方法。16.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机程序或指令,当所述计算机程序或指令被计算机执行时,实现如权利要求1至7中任一项所述的方法。
技术总结
一种聚焦方法及装置,用于在摄像装置变倍结束之后,提升聚焦速度,使得目标物体快速的清晰呈现在摄像装置中。该方法包括:获取第一位置参数,第一位置参数中包括变倍电机的第一位置;根据第一位置参数和预设对应关系,确定第一位置参数对应的阈值;获取聚焦电机在第二位置时预览图像的图像清晰度的评价指标;根据聚焦电机在第二位置时预览图像的图像清晰度的评价指标和第二位置,确定聚焦电机在第二位置时对应的特征参数;根据聚焦电机在第二位置时对应的特征参数,和第一位置参数对应的阈值,确定聚焦电机进行聚焦处理所采用的聚焦步长方式;控制聚焦电机按照聚焦步长方式由第二位置移动。位置移动。位置移动。
技术研发人员:卓峰
受保护的技术使用者:华为技术有限公司
技术研发日:2021.07.29
技术公布日:2023/2/6
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。