技术特征:
1.一种复合材料三维编织机多电机协同控制方法,其特征在于,包括如下步骤:(1)构建电机动力学模型(2)将步骤(1)中给出的上述电机动力学模型变形为以下形式其中h为系统集总未知不确定性动态,是待设计的正对角参数矩阵;h的定义如下(3)定义速度跟踪误差其中为n台电机的期望速度,ω
r
∈r
n
×1是n台电机的实际速度;设计协同误差和为e
s
=te;耦合误差为e
c
=e γe
s
=(1 γt)e其中t为设计的协同矩阵,γ为对角矩阵系数;(4)基于步骤(3)所设计耦合误差,设计如下分数阶非奇异终端滑模超平面其中k1,k2,α1,α2,β1,β2为待设计的控制参数矩阵/向量,且有0<α
1i
,α
2i
<1,0<β
1i
,β
2i
<1,k
1i
>0,k
2i
>0,i=1~n;>0,i=1~n;为分数阶微积分算子;定义以下快速终端滑模趋近律其中μ1,μ2,γ为待设计的控制参数矩阵/向量,且其各元素均为正值;(5)基于步骤(4)所提分数阶非奇异终端滑模超平面和快速终端滑模趋近律,得到所提控制算法为:控制算法为:其中为h的估计值;(6)在步骤(5)的基础上,采用时延估计技术估算h以得到(6)在步骤(5)的基础上,采用时延估计技术估算h以得到其中x
(t-l)
代表变量x在时刻(t-l)处的值,l为延时长度选取为1个或若干采用周期;(7)结合步骤(5)和步骤(6)所得结果,得到所提基于时延估计的复合材料三维编织机多电机协同控制方法:2.如权利要求1所述的协同控制方法,其特征在于,步骤(1)中,获得电机动力学模型的
步骤包括:(1.1)建立单交流永磁同步电机在转子d-q轴系下的数学模型:q轴系下的数学模型:λ
q
=l
q
i
q
λ
d
=l
d
i
d
l
md
i
df
ω
f
=n
p
ω
r
其中u
d
是d轴定子电压,u
q
是q轴定子电压;i
d
是d轴定子电流,i
q
是q轴定子电流;λ
d
是d轴定子磁链,λ
q
是q轴定子磁链;l
d
是d轴定子电感,l
q
是q轴定子电感;ω
f
是d、q轴转子电转速,ω
r
是d、q轴机械转速;l
md
是d轴互感系数,i
df
是d轴等效励磁电流,n
p
是极对数,rs是定子电阻;(1.2)电机所产生电磁转矩为t
e
=1.5n
p
[l
md
i
df
i
q
(l
d-l
q
)i
q
i
d
]电机的动力学模型为其中t
l
是电机的负载转矩,b
m
是粘滞摩擦系数,j是转动惯量;为简化系统模型,基于磁场定向控制,有则电机电磁转矩简化为t
e
=1.5n
p
l
md
i
df
i
q
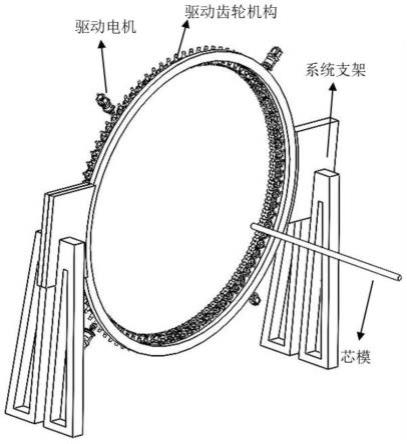
将电机动力学方程与上式结合有电机动力学模型3.如权利要求1所述的协同控制方法,其特征在于,步骤(3)中,协同矩阵t定义为其中n为用于协同控制的电机数量。4.如权利要求1或2或3所述的协同控制方法,其特征在于,该协同控制方法控制的三维编织机中采用n个交流永磁同步电机作为驱动电机使驱动齿轮机构转动;齿轮驱动机构包括若干齿轮,该若干齿轮相邻啮合而形成环状的齿轮,n个驱动电机在圆周方向间隔均匀布置,对应该n个驱动电机位置的齿轮作为主动齿轮,主动齿轮分别与n个驱动电机的输出轴连接并通过驱动电机的驱动而转动;n个驱动电机同时驱动。5.如权利要求4所述的协同控制方法,其特征在于,采用4个交流永磁同步电机作为驱动电机使驱动齿轮机构转动,四个驱动电机在圆周方向间隔90
°
均匀布置。
技术总结
本发明公开一种复合材料三维编织机多电机协同控制方法。该方法采用时延估计技术来估算电机闭环控制系统的集总不确定性,使得整个控制算法不依赖于系统模型。在此基础上,提出一种新型耦合误差设计方法和一种新型分数阶非奇异终端滑模超平面设计方法,继而推导得到一种基于时延估计的复合材料三维编织机多电机协同控制方法。受益于时延估计技术、新型耦合误差设计方法和分数阶非奇异终端滑模控制方法的应用,所提复合材料三维编织机多电机协同控制方法具有优异的综合协同控制品质和良好的工程应用前景,适用于大型复合材料三维编织机的多电机协同控制。织机的多电机协同控制。织机的多电机协同控制。
技术研发人员:王尧尧 单忠德 孙正 袁志超
受保护的技术使用者:南京航空航天大学
技术研发日:2022.11.21
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。