技术特征:
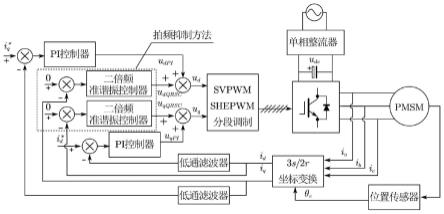
1.一种用于动车组永磁同步电机牵引系统的拍频抑制方法,其特征在于,包括以下步骤:步骤1:将电流传感器采集的电机三相电流变换到旋转坐标系下;步骤2:基于d、q轴电流设定值以及低通滤波处理后的d、q轴电流进行pi控制,以输出d、q轴电压调节值;步骤3:针对d、q轴电流二倍频分量,设计准谐振控制器,用于抑制拍频电流;步骤4:将pi控制器的输出和准谐振控制器的输出相叠加,得到最终的d、q轴参考电压;步骤5:生成的参考电压经过pwm环节,最终实现对动车组永磁同步电机牵引系统的拍频抑制。2.按照权利要求1所述的拍频抑制方法,其特征在于,所述的步骤1中:忽略高频谐波,电机三相电流中存在ω
e-2ω
g
的低频电流波动分量和ω
e
2ω
g
的高频电流波动分量,表示为:其中,i
a
,i
b
,i
c
为电机三相电流,t为时间ω
e
为电机角速度,ω
g
为电网频率,i
s
和i
h
分别为基波电流幅值和波动电流幅值,为低频波动分量和高频波动分量相位;采用等幅值变换如下所示:其中,θ为电角度;结合式(1)和(2),得到旋转坐标系下的d、q轴电流为:其中,i
d
,i
q
为d、q轴电流,i
d0
,i
q0
为d、q轴基波电流;在旋转坐标系下,d、q轴电流存在二倍频分量。3.按照权利要求2所述的拍频抑制方法,其特征在于,所述的步骤2中,一阶低通滤波器传递函数为:其中,ω
f
=2πf
c
,f
c
为低通滤波器的截止频率,s为复变量;对滤波后的d、q轴电流进行比例积分控制,得到d、q轴电压调节值,计算如下:其中,k
p
,k
i
为pi控制器系数,为d、q轴电流给定,i
drpf
,i
qlpf
为经过低通滤波器后的d、q轴电流,u
dpi
,u
qpi
为pi控制器的输出。
4.按照权利要求3所述的拍频抑制方法,其特征在于,所述的步骤3中,采用带延时补偿的准谐振控制器对二倍频分量进行抑制,其传递函数为:其中,ω
n
为谐振频率,ω
c
为准谐振控制器带宽,θ
n
为控制系统中存在的滞后相角;为了抑制d、q轴电流二倍频分量,采用谐振频率为2ω
g
的准谐振控制器,计算如下:其中,u
dqrsc
,u
qqrsc
为准谐振控制器的输出,k
r
为准谐振控制器的系数,通过调节k
r
就可以实现对拍频电流的抑制。5.按照权利要求4所述的拍频抑制方法,其特征在于,所述的步骤3中,采用带预畸变的双线性变换方法对式(6)的传递函数进行离散,离散方法具体为:其中,t
s
为离散步长,z为离散系统复变量根据式(6)和(8),得到离散的准谐振控制器传递函数如下:其中,a
n1
,a
n2
,b
n0
,b
n1
,b
n2
为系数,具体为:6.按照权利要求5所述的拍频抑制方法,其特征在于,所述的步骤4中,利用步骤2的pi控制器实现对基波电流的跟踪,利用步骤3的准谐振控制器实现对拍频电流的抑制,将两者的输出相叠加,就能得到最终的参考电压:其中,u
d
,u
q
为最终的参考电压。7.按照权利要求6所述的拍频抑制方法,其特征在于,所述的步骤5包括:利用步骤4得到最终的参考电压以及采集的直流侧电压,计算调制比和角度如下:
其中,u
dc
为直流侧母线电压,k
v
和θ
v
分别为调制比和角度;根据调制比、角度和频率实现异步调制、同步调制以及方波调制,生成pwm信号,控制开关管的通断,最终实现对动车组永磁同步电机牵引系统的拍频抑制。
技术总结
本发明提供了一种用于动车组永磁同步电机牵引系统的拍频抑制方法。所述方法包括:根据传感器采集的永磁电机三相电流得到同步旋转坐标系下的d、q轴电流;根据d、q轴电流给定和d、q轴电流误差通过PI控制器生成d、q轴参考电压调节值;应用预设的准谐振控制器对d、q轴电流中存在的电网二倍频波动进行抑制,将PI控制器的输出和准谐振控制器的输出相叠加,得到最终的d、q轴参考电压;生成的参考电压经过PWM环节,最终实现对动车组永磁同步电机牵引系统的拍频抑制。与现有控制技术相比,本发明在去除LC谐振电路的基础上,通过提出的控制算法对拍频电流进行抑制,降低了转矩脉动,提升了系统稳定性。稳定性。稳定性。
技术研发人员:朱进权 葛琼璇 赵鲁 王珂 张波 王晓新 赵牧天 曹学谦 郑彦喜
受保护的技术使用者:中国科学院电工研究所
技术研发日:2022.11.21
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。