技术特征:
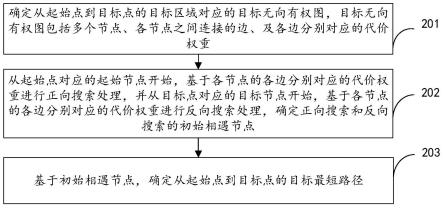
1.一种最短路径的确定方法,包括:确定从起始点到目标点的目标区域对应的目标无向有权图,所述目标无向有权图包括多个节点、各节点之间连接的边、及各边分别对应的代价权重;从所述起始点对应的起始节点开始,基于各节点的各边分别对应的所述代价权重进行正向搜索处理,并从所述目标点对应的目标节点开始,基于各节点的各边分别对应的所述代价权重进行反向搜索处理,确定正向搜索和反向搜索的初始相遇节点;基于所述初始相遇节点,确定从所述起始点到所述目标点的目标最短路径。2.根据权利要求1所述的方法,其中,所述从所述起始点对应的起始节点开始,基于各节点的各边分别对应的所述代价权重进行正向搜索处理,并从所述目标点对应的目标节点开始,基于各节点的各边分别对应的所述代价权重进行反向搜索处理,确定正向搜索和反向搜索的初始相遇节点,包括:基于各节点的各边分别对应的所述代价权重,采用广度优先遍历方式,分别从所述起始节点和所述目标节点进行正向搜索和反向搜索,直至正向搜索确定的当前正向节点在反向搜索已搜索的反向节点中,或者反向搜索确定的当前反向节点在正向搜索已搜索的正向节点中,确定所述当前正向节点或所述当前反向节点为所述初始相遇节点,其中,所述当前正向节点为当前正向搜索过程确定的与所述起始节点距离最短的节点,所述当前反向节点为当前反向搜索过程确定的与所述目标节点距离最短的节点。3.根据权利要求1所述的方法,其中,所述从所述起始点对应的起始节点开始,基于各节点的各边分别对应的所述代价权重进行正向搜索处理,并从所述目标点对应的目标节点开始,基于各节点的各边分别对应的所述代价权重进行反向搜索处理,确定正向搜索和反向搜索的初始相遇节点,包括:对于第i次搜索,执行以下步骤:基于各节点的各边分别对应的所述代价权重,从第i正向扩展节点集中,确定与所述起始节点距离最短的第i正向节点,其中,第1正向扩展节点集包括所述起始节点连接的正向后继节点,i为正整数;响应于所述第i正向节点为第k反向节点,确定所述第i正向节点为所述初始相遇节点,其中,k为小于i的正整数,第k反向节点为第k次搜索的反向搜索过程确定的与所述目标节点距离最短的反向节点。4.根据权利要求3所述的方法,还包括:响应于所述第i正向节点不是所述第k反向节点,确定所述第i正向节点不是所述初始相遇节点,将所述第i正向节点从所述第i正向扩展节点集中去除,并将与所述第i正向节点连接的第i正向后继节点加入所述第i正向扩展节点集,获得第i 1正向扩展节点集;基于各节点的各边分别对应的所述代价权重,从第i反向扩展节点集中,确定与所述目标节点距离最短的第i反向节点,第1反向扩展节点集包括所述目标节点连接的反向后继节点;响应于所述第i反向节点不是所述初始相遇节点,将所述第i反向节点从所述第i反向扩展节点集中去除,并将与所述第i反向节点连接的第i反向后继节点加入所述第i反向扩展节点集,获得第i 1反向扩展节点集;响应于所述第i反向节点为第j正向节点,确定所述第i反向节点为所述初始相遇节点,
j为小于或等于i的正整数。5.根据权利要求4所述的方法,其中,所述基于所述初始相遇节点,确定从所述起始点到所述目标点的目标最短路径,包括:基于所述初始相遇节点与所述起始节点之间的最短距离、及所述初始相遇节点与所述目标节点之间的最短距离,确定所述初始相遇节点对应的第一目标最短距离;从所述第i 1正向扩展节点集中,确定出至少一个第一相遇节点;基于各所述第一相遇节点、及所述第一目标最短距离,确定第二目标最短距离;响应于所述第i正向节点为所述初始相遇节点,从所述第i反向扩展节点集中,确定出至少一个第二相遇节点;基于各所述第二相遇节点及所述第二目标最短距离,确定第三目标最短距离;将所述第三目标最短距离对应的路径作为所述目标最短路径;或者,响应于所述第i反向节点为所述初始相遇节点,从所述第i 1反向扩展节点集中确定出至少一个第三相遇节点;基于各所述第三相遇节点、及所述第一目标最短距离,确定第四目标最短距离;将所述第四目标最短距离对应的路径作为所述目标最短路径。6.根据权利要求5所述的方法,其中,在将所述第i正向节点从所述第i正向扩展节点集中去除,并将与所述第i正向节点连接的第i正向后继节点加入所述第i正向扩展节点集,获得第i 1正向扩展节点集之后,还包括:基于所述第i正向节点与所述起始节点之间的第一最短距离、及所述第i正向节点与各所述第i正向后继节点之间的代价权重,确定各所述第i正向后继节点与所述起始节点的第二最短距离;在所述将所述第i反向节点从所述第i反向扩展节点集中去除,并将与所述第i反向节点连接的第i反向后继节点加入所述第i反向扩展节点集,获得第i 1反向扩展节点集之后,还包括:基于所述第i反向节点与所述目标节点之间的第三最短距离、及所述第i反向节点与各所述第i反向后继节点之间的代价权重,确定各所述第i反向后继节点与所述目标节点的第四最短距离。7.根据权利要求6所述的方法,其中,所述基于各节点的各边分别对应的所述代价权重,从第i正向扩展节点集中,确定与所述起始节点距离最短的第i正向节点,包括:基于所述第i正向扩展节点集中各正向后继节点与所述起始节点的所述第二最短距离,确定与所述起始节点距离最短的第i正向节点;所述基于各节点的各边分别对应的所述代价权重,从第i反向扩展节点集中,确定与所述目标节点距离最短的第i反向节点,包括:基于所述第i反向扩展节点集中各反向后继节点与所述目标节点的所述第四最短距离,确定与所述目标节点距离最短的第i反向节点。8.根据权利要求6所述的方法,其中,在基于各节点的各边分别对应的所述代价权重,从第i正向扩展节点集中,确定与所述起始节点距离最短的第i正向节点之后,还包括:将所述第i正向节点加入到第i正向搜索节点集,获得第i 1正向搜索节点集,第1正向搜索节点集包括所述起始节点;
在所述基于各节点的各边分别对应的所述代价权重,从第i反向扩展节点集中,确定与所述目标节点距离最短的第i反向节点之后,还包括:将所述第i反向节点加入到第i反向搜索节点集,获得第i 1反向搜索节点集,第1反向搜索节点集包括所述目标节点;所述响应于所述第i正向节点为第k反向节点,确定所述第i正向节点为所述初始相遇节点,包括:响应于所述第i正向节点在第i反向搜索节点集中,确定所述第i正向节点为所述初始相遇节点;所述响应于所述第i反向节点为第j正向节点,确定所述第i反向节点为所述初始相遇节点,包括:响应于所述第i反向节点在所述第i 1正向搜索节点集中,确定所述第i反向节点为所述初始相遇节点。9.根据权利要求8所述的方法,其中,在响应于所述第i正向节点在第i反向搜索节点集中,确定所述第i正向节点为所述初始相遇节点之后,所述基于所述初始相遇节点,确定从所述起始点到所述目标点的目标最短路径,包括:基于所述第i正向节点与所述起始节点之间的最短距离、及所述第i正向节点与所述目标节点之间的最短距离,确定所述初始相遇节点对应的所述第一目标最短距离;响应于第i n正向扩展节点集不为空,从第i n正向扩展节点集中确定与所述起始节点距离最短的第i n正向节点,n=1、2、n,n为所述第i 1正向扩展节点集中的节点数量;将所述第i n正向节点从所述第i n正向扩展节点集中去除,获得第i n 1正向扩展节点集;将所述第i n正向节点加入到第i n正向搜索节点集,获得第i n 1正向搜索节点集;响应于所述第i n正向节点在第i n-1反向搜索节点集中,基于在前目标最短距离、所述第i n正向节点与所述起始节点之间的最短距离、及所述第i n正向节点与所述目标节点之间的最短距离,确定当前目标最短距离,第i 1次搜索的在前目标最短距离为所述第一目标最短距离;在完成所述第i 1正向扩展节点集中的n个节点的搜索后,获得第二目标最短距离;从第i反向扩展节点集中确定与所述起始节点距离最短的第i n 1正向节点;将所述第i n 1正向节点从所述第i反向扩展节点集中去除,获得第i 1反向扩展节点集;将所述第i n 1正向节点加入到第i反向搜索节点集中,获得第i 1反向搜索节点集;响应于所述第i n 1正向节点在第i n 1正向搜索节点集中,基于所述第二目标最短距离、所述第i n 1正向节点与所述起始节点之间的最短距离、及所述第i n 1正向节点与所述目标节点之间的最短距离,确定第三目标最短距离;响应于所述第i 1反向扩展节点集为空,将所述第三目标最短距离对应的路径作为所述目标最短路径。10.根据权利要求9所述的方法,其中,在基于所述第i正向扩展节点集中各正向后继节点与所述起始节点的所述第二最短距离,确定与所述起始节点距离最短的第i正向节点之后,还包括:
分别记录各所述第i正向节点与所述起始节点之间的最短路径;所述基于所述第i反向扩展节点集中各反向后继节点与所述目标节点的所述第四最短距离,确定与所述目标节点距离最短的第i反向节点之后,还包括:分别记录各所述第i反向节点与所述目标节点之间的最短路径;所述响应于所述第i 1反向扩展节点集为空,将所述第三目标最短距离对应的路径作为所述目标最短路径,包括:基于所述第三目标最短距离对应的目标相遇节点与所述起始节点之间的最短路径、及所述目标相遇节点与所述目标节点之间的最短路径,确定所述目标最短路径。11.根据权利要求8所述的方法,其中,在响应于所述第i反向节点在所述第i 1正向搜索节点集中,确定所述第i反向节点为所述初始相遇节点之后,所述基于所述初始相遇节点,确定从所述起始点到所述目标点的目标最短路径,包括:基于所述第i反向节点与所述起始节点之间的最短距离、及所述第i反向节点与所述目标节点之间的最短距离,确定所述初始相遇节点对应的第一目标最短距离;响应于第i n正向扩展节点集不为空,从第i n正向扩展节点集中确定与所述起始节点距离最短的第i n正向节点,n=1、2、n,n为所述第i 1正向扩展节点集中的节点数量;将所述第i n正向节点从所述第i n正向扩展节点集中去除,获得第i n 1正向扩展节点集;将所述第i n正向节点加入到所述第i n正向搜索节点集,获得第i n 1正向搜索节点集;响应于所述第i n正向节点在第i n反向搜索节点集中,基于在前目标最短距离、所述第i n正向节点与所述起始节点之间的最短距离、及所述第i n正向节点与所述目标节点之间的最短距离,确定当前目标最短距离,第i 1次搜索的在前目标最短距离为所述第一目标最短距离;在完成所述第i 1正向扩展节点集中的n个节点的搜索后,获得第二目标最短距离;从第i 1反向扩展节点集中确定与所述起始节点距离最短的第i n 1正向节点;将所述第i n 1正向节点从所述第i 1反向扩展节点集中去除,获得第i 2反向扩展节点集;将所述第i n 1正向节点加入到第i 1反向搜索节点集中,获得第i 2反向搜索节点集;响应于所述第i n 1正向节点在第i n 1正向搜索节点集中,基于所述第二目标最短距离、所述第i n 1正向节点与所述起始节点之间的最短距离、及所述第i n 1正向节点与所述目标节点之间的最短距离,确定第四目标最短距离;响应于所述第i 2反向扩展节点集为空,将所述第四目标最短距离对应的路径作为所述目标最短路径。12.根据权利要求1-11任一所述的方法,其中,确定从起始点到目标点的目标区域对应的目标无向有权图,包括:将所述目标区域中的预设对象作为节点,将各所述预设对象之间连接的道路作为各节点之间连接的边,基于各所述道路的长度确定各所述边分别对应的代价权重,构建所述目标无向图。13.一种最短路径的确定装置,包括:
第一确定模块,用于确定从起始点到目标点的目标区域对应的目标无向有权图,所述目标无向有权图包括多个节点、各节点之间连接的边、及各边分别对应的代价权重;第一处理模块,用于从所述起始点对应的起始节点开始,基于各节点的各边分别对应的所述代价权重进行正向搜索处理,并从所述目标点对应的目标节点开始,基于各节点的各边分别对应的所述代价权重进行反向搜索处理,确定正向搜索和反向搜索的初始相遇节点;第二处理模块,用于基于所述初始相遇节点,确定从所述起始点到所述目标点的目标最短路径。14.一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序用于执行上述权利要求1-12任一所述的最短路径的确定方法。15.一种电子设备,所述电子设备包括:处理器;用于存储所述处理器可执行指令的存储器;所述处理器,用于从所述存储器中读取所述可执行指令,并执行所述指令以实现上述权利要求1-12任一所述的最短路径的确定方法。
技术总结
本公开实施例公开了一种最短路径的确定方法、装置、电子设备和存储介质,其中,方法包括:确定从起始点到目标点的目标区域对应的目标无向有权图,目标无向有权图包括多个节点、各节点之间连接的边、及各边分别对应的代价权重;从起始点对应的起始节点开始,基于各节点的各边分别对应的代价权重进行正向搜索处理,并从目标点对应的目标节点开始,基于各节点的各边分别对应的代价权重进行反向搜索处理,确定正向搜索和反向搜索的初始相遇节点;基于初始相遇节点,确定从起始点到目标点的目标最短路径。本公开实施例通过双向搜索相遇可以避免中间部分扩展节点的指数级增长,从而降低搜索的时空复杂度,提高最短路径的确定效率。提高最短路径的确定效率。提高最短路径的确定效率。
技术研发人员:张磊
受保护的技术使用者:地平线(上海)人工智能技术有限公司
技术研发日:2022.11.04
技术公布日:2023/2/6
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。