技术特征:
1.一种水下磁场高精度测量方法,应用于水下磁场高精度测量系统,所述系统包括:第一uuv和第二uuv,所述第一uuv和所述第二uuv通过光纤连接,所述第一uuv和所述第二uuv均沿磁场测量轨迹航行,所述磁场测量轨迹设置有i个磁场测量位置及对应的i个磁场测量子位置,其中,i=1,2,3,...,b;水下测量分系统,搭载于所述第一uuv上,与所述水下中继分系统进行实时通信;水下中继分系统,搭载于所述第二uuv上;中心控制分系统,与所述水下中继分系统进行实时通信;其特征在于,包括如下步骤:所述第二uuv保持静止,所述第一uuv向第i磁场测量位置航行,所述水下测量分系统发射第二高频声纳信号,所述水下中继分系统通过所述第二高频声纳信号的发射时间和到达时间对所述第一uuv进行位姿校准,确保第一uuv能够到达第i磁场测量位置;当所述第一uuv到达第i磁场测量位置时,所述第一uuv停止航行,所述水下测量分系统对水下磁场进行测量,输出所述磁场测量信息至所述水下中继分系统;其中,i=1,2,3,...,n;当所述第一uuv到达第i磁场测量位置时,所述第二uuv航行至第i磁场测量子位置,在所述第二uuv航行的过程中,所述水下测量分系统根据所述第二高频声纳信号的发射时间和到达时间对所述第二uuv进行位姿校准;判断所述水下测量分系统是否完成在所有所述磁场测量位置的磁场测量;如果否,则令i=i 1,循环以上步骤;如果所述水下测量分系统完成在所有所述磁场测量位置的磁场测量,则所述第一uuv和所述第二uuv均返回至所述磁场测量轨迹的起点位置;其中,当所述第二uuv获得所述磁场测量信息时,所述水下中继分系统将所述磁场测量信息发送至所述中心控制分系统,所述中心控制分系统对所述磁场测量信息进行处理并计算,输出计算结果并展示。2.根据权利要求1所述的一种水下磁场高精度测量方法,其特征在于,所述水下中继分系统通过所述第二高频声纳信号对所述第一uuv进行位姿校准,具体包括:所述水下中继分系统通过其包括的水听器阵列获取所述第二高频声纳信号;所述水下中继分系统通过其包括的第二光纤通信装置获取由所述水下测量分系统发送的第一发射时间值;其中,所述第一发射时间值定义为在所述第一uuv航行的过程中,所述水下测量分系统发射第二高频声纳信号的时间值;所述水下中继分系统通过其包括的第二嵌入式智能控制装置记录第一到达时间值;其中,所述第一到达时间值定义为在所述第一uuv航行的过程中,所述第二高频声纳信号到达所述水下中继分系统的时间值;所述第二嵌入式智能控制装置通过将所述第一到达时间值和所述第一发射时间值作差,计算得出所述第一uuv与所述第i磁场测量位置的间距,记作第一距离;根据所述第一距离,所述第二嵌入式智能控制装置通过所述第二光纤通信装置输出第一位姿校准信号,所述第一位姿校准信号用于对所述第一uuv进行位姿校准;其中,所述水听器阵列包括三个水听器,三个所述水听器以所述第二uuv的中心为中心
呈等边三角形布置,所述水听器均用于接收所述第二高频声纳信号。3.根据权利要求1所述的一种水下磁场高精度测量方法,其特征在于,所述第二uuv航行的过程中,所述水下测量分系统根据所述第二高频声纳信号对所述第二uuv进行位姿校准,具体包括:所述水下测量分系统通过其包括的第一嵌入式智能控制装置记录第二发射时间值;其中,所述第二发射时间值定义为在所述第二uuv航行的过程中,所述水下测量分系统发射第二高频声纳信号的时间值;所述水下测量分系统通过其包括的第一光纤通信装置获取由所述水下中继分系统发送的第二到达时间值;其中,所述第二到达时间值定义为在所述第二uuv航行的过程中,所述第二高频声纳信号到达所述水下中继分系统的时间值;所述第一嵌入式智能控制装置通过将所述第二到达时间值和所述第二发射时间值作差,计算出所述第二uuv与所述第i磁场测量子位置的间距,记作第二距离;根据所述第二距离,所述第一嵌入式智能控制装置通过所述第一光纤通信装置输出第二位姿校准信号,所述第二位姿校准信号用于对所述第二uuv进行位姿校准。4.根据权利要求1所述的一种水下磁场高精度测量方法,其特征在于,在所述第二uuv保持静止,所述第一uuv向第i磁场测量位置航行之前,还包括:所述第一uuv和所述第二uuv下降至指定的水下深度,所述第一uuv和所述第二uuv位于所述磁场测量轨迹的起点位置;其中,所述第一uuv和所述第二uuv下降至指定的水下深度,包括:在所述第一uuv在水中下降的过程中,所述水下测量分系统通过其所包括的第一深度传感器测量所述第一uuv所在位置水深,当所述第一uuv所在位置水深为所述指定的水下深度时,所述第一uuv停止下降;在所述第二uuv在水中下降的过程中,所述水下中继分系统通过其所包括的第二深度传感器测量所述第二uuv所在位置水深,当所述第二uuv所在位置水深为指定的水下深度时,所述第二uuv停止下降。5.根据权利要求4所述的一种水下磁场高精度测量方法,其特征在于,所述系统还包括:基站定位分系统;在所述第一uuv和所述第二uuv下降至指定的水下深度,之前,还包括:所述基站定位分系统的第一刚体伸缩杆的一端固定于船只的船首位置,所述第一刚体伸缩杆的另一端连接有高频声纳聚束发射器;所述高频声纳聚束发射器、所述第一uuv和所述第二uuv放置于水下,所述高频声纳聚束发射器垂直向下发射第一高频声纳信号;所述水下中继分系统通过其所包括的水听器阵列获取所述第一高频声纳信号;所述水下中继分系统通过其所包括的第二嵌入式智能控制装置,结合所述第一高频声纳信号对所述第二uuv进行位姿调整,确保所述第二uuv的初始位置处于所述高频声纳聚束发射器的正下方。6.根据权利要求1所述的一种水下磁场高精度测量方法,其特征在于,所述水下测量分系统发射第二高频声纳信号,包括:
所述水下测量分系统通过其所包括的第一高频声纳换能器和第二高频声纳换能器发射所述第二高频声纳信号;其中,所述第一高频声纳换能器和所述第二高频声纳换能器通过刚体连接,所述第一高频声纳换能器固定在所述第一uuv的一端,所述第二高频声纳换能器固定在所述第一uuv的另一端。7.根据权利要求1所述的一种水下磁场高精度测量方法,其特征在于,所述水下测量分系统对水下磁场进行测量,输出所述磁场测量信息至所述水下中继分系统,包括:所述水下测量分系统通过其所包括的磁场测量装置进行水下磁场的测量,得到所述磁场测量信息;所述水下测量分系统通过其所包括的第一光纤通信装置将所述磁场测量信息发送至所述水下中继分系统。8.根据权利要求1所述的一种水下磁场高精度测量方法,其特征在于,所述水下中继分系统将所述磁场测量信息发送至所述中心控制分系统,所述中心控制分系统对所述磁场测量信息进行处理并计算,输出计算结果并展示,包括:所述水下中继分系统通过其所包括的第二光纤通信装置获取所述磁场测量信息;所述水下中继分系统通过其所包括的浮标通信装置将所述磁场测量信息输出至所述中心控制分系统;所述中心控制分系统通过其所包括的无线电通信装置获取所述磁场测量信息,并通过其所包括的上位机对所述磁场测量信息进行计算,输出计算结果并显示。9.一种水下磁场高精度测量系统,其特征在于,包括:基站定位分系统、水下测量分系统、水下中继分系统和中心控制分系统,所述水下测量分系统搭载于第一uuv,所述水下中继分系统搭载于第二uuv上,所述水下中继分系统分别与所述水下测量分系统和所述中心控制分系统进行实时通信;所述第一uuv和所述第二uuv通过光纤连接,所述第一uuv和所述第二uuv均沿磁场测量轨迹航行;其中,所述基站定位分系统包括:高频声纳聚束发射器,用于沿垂直方向向下发射第一高频声纳信号,所述第一高频声纳信号用于对所述第二uuv进行定位,确保所述第二uuv的初始位置位于所述高频声纳聚束发射器的正下方;刚体伸缩杆,其一端用于固定于船只的船首,其另一端与所述高频声纳聚束发射器连接;其中,所述水下测量分系统包括:第一深度传感器,用于检测所述第一uuv所在位置水深;磁场测量装置,用于进行水下磁场的测量,得到磁场测量信息;第一高频声纳换能器和第二高频声纳换能器,用于发射第二高频声纳信号;所述第一高频声纳换能器和所述第二高频声纳换能器通过刚体连接,所述第一高频声纳换能器固定在所述第一uuv的一端,所述第二高频声纳换能器固定在所述第一uuv的另一端;第一光纤通信装置,用于与所述水下中继分系统进行实时通信;第一嵌入式智能控制装置,用于记录第二发射时间值和第二到达时间值,根据所述第
二发射时间值和所述第二到达时间值的差值,通过所述第一光纤通信装置输出第二位姿校准信号至所述水下中继分系统;所述第二位姿校准信号用于控制第二uuv进行位姿校准;所述第一嵌入式智能控制装置还用于生成所述第一uuv的特定状态信息;所述第二发射时间值定义为在所述第二uuv航行的过程中,所述水下测量分系统发射第二高频声纳信号的时间值;所述第二到达时间值定义为在所述第二uuv航行的过程中,所述第二高频声纳信号到达所述水下中继分系统的时间值;其中,所述水下中继分系统包括:第二深度传感器,用于检测所述第二uuv所在位置水深;水听器阵列,所述水听器阵列包括三个水听器,三个所述水听器以所述第二uuv的中心为中心呈等边三角形布置,所述水听器均用于接收所述第二高频声纳信号;第二光纤通信装置,用于与所述第一光纤通信装置进行实时通信;第二嵌入式智能控制装置,用于记录第一到达时间值和第一发射时间值,根据所述第一到达时间值和所述第一发射时间值的差值,通过所述第二光纤通信装置输出第一位姿校准信号,所述第一位姿校准信号用于对所述第一uuv进行位姿校准;其中,所述第一发射时间值定义为在所述第一uuv航行的过程中,所述水下测量分系统发射第二高频声纳信号的时间值;所述第一到达时间值定义为在所述第一uuv航行的过程中,所述第二高频声纳信号到达所述水下中继分系统的时间值;所述第二嵌入式智能控制装置还用于生成所述第二uuv的特定状态信息;浮标通信装置,用于将所述磁场测量信息、所述第一uuv的特定状态信息和所述第二uuv的特定状态信息输出至所述中心控制分系统;其中,所述中心控制分系统包括:无线电通信装置,用于与所述浮标通信装置进行实时通信;上位机,用于处理所述磁场测量信息、所述第一uuv的特定状态信息和所述第二uuv的特定状态信息,输出处理结果并显示于人机交互界面。10.根据权利要求9所述的一种水下磁场高精度测量系统,其特征在于,所述水听器阵列还用于获取所述第一高频声纳信号;所述第二嵌入式智能控制装置还用于结合所述第一高频声纳信号对所述第二uuv进行位姿调整,确保所述第二uuv处于所述高频声纳聚束发射器的正下方。
技术总结
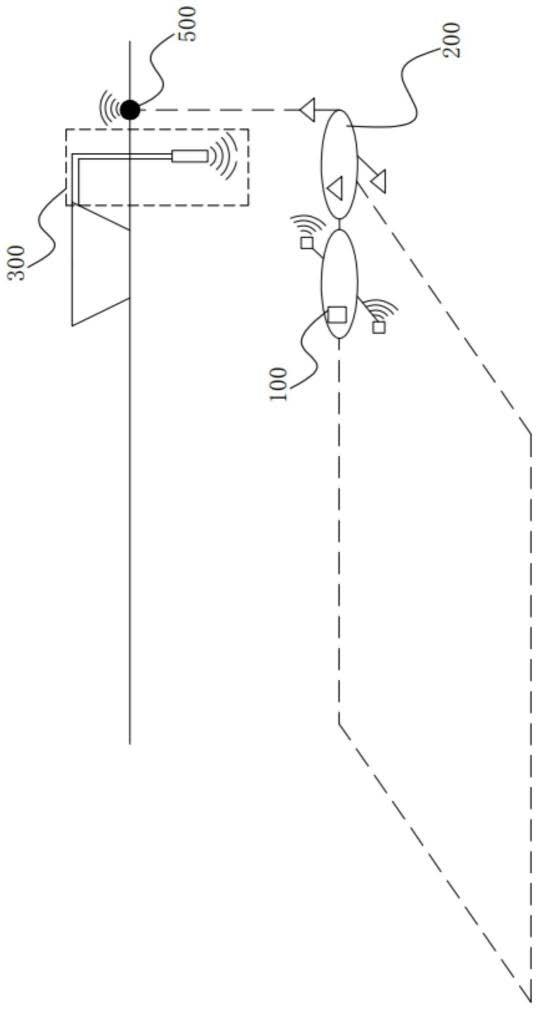
本发明公开了一种水下磁场高精度测量方法及系统,该系统包括:水下测量分系统、水下中继分系统、中心控制分系统和基站定位分系统;测量分系统搭载于第一UUV上,中继分系统搭载于第二UUV上,第一UUV和第二UUV均沿磁场测量轨迹航行;测量分系统用于测量水下磁场的信息并发送给控制分系统,控制分系统处理磁场信息;在进行磁场测量的过程,中继分系统对第一UUV进行位姿校准,而测量分系统对第二UUV进行位姿校准。本申请无需搭建固定的水下磁场测量场所,通过多分系统相互协作实现水下磁场的探测,确保了磁测量仪器的定位精度和测量准确率,提高了磁场检测的工作效率,可以在远航途中的情况下实现水下磁场的检测。中的情况下实现水下磁场的检测。中的情况下实现水下磁场的检测。
技术研发人员:李恪 姚瑶 黄晨 梁家平
受保护的技术使用者:汕头大学
技术研发日:2022.11.07
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。