技术特征:
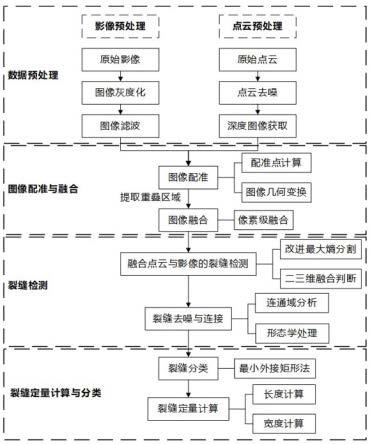
1.一种基于深度和灰度信息的鱼道裂缝智能检测方法,其特征在于,包括如下步骤:步骤一、数据预处理:分别采集二维影像和三维点云数据,并对两种数据进行预处理进而获取高质量的二维灰度影像和深度图像;步骤二、裂缝粗提取:利用改进的最大熵方法,分别提取二维灰度影像和深度图像中的裂缝;步骤三、图像配准与融合判断:基于特征点进行图像配准,对步骤二中提取的裂缝像素进行判断,当且仅当该像素点在二维灰度影像和深度图像中同时为裂缝时,判断为真裂缝点,保留该像素点,否则为背景点,删除该裂缝像素点;步骤四、裂缝精提取:首先利用连通域分析法去除较大的裂缝噪点,然后利用形态学处理方法去除裂缝的毛刺和连接断裂的裂缝;步骤五、裂缝分类与定量计算:利用最小外接矩形法对裂缝进行分类,然后对裂缝的长度和宽度进行定量计算。2.根据权利要求1所述的一种基于深度和灰度信息的鱼道裂缝智能检测方法,其特征在于,所述步骤一中,对采集的二维影像进行预处理包括图像灰度化、图像去噪和图像增强,图像灰度化包括分量法或最大值法或平均值法或加权平均值法,图像去噪包括均值滤波或中值滤波或自适应中值滤波,所述图像增强包括直方图均衡法。3.根据权利要求1所述的一种基于深度和灰度信息的鱼道裂缝智能检测方法,其特征在于,所述步骤一中,对采集的三维点云数据进行预处理包括点云去噪、点云坐标变换和深度图像获取,点云去噪包括利用点云处理软件滤除漂移点、离群点和冗余点。4.根据权利要求3所述的一种基于深度和灰度信息的鱼道裂缝智能检测方法,其特征在于,所述点云坐标变换,首先通过深度阈值去除裂缝点云,然后用剩下的非裂缝点云进行平面拟合,将点云从原坐标系转换到以混凝土非裂缝点的拟合平面为xoy面的新坐标系下,通过对点云进行平面拟合并求解旋转变换矩阵,进而实现点云坐标变换。5.根据权利要求3所述的一种基于深度和灰度信息的鱼道裂缝智能检测方法,其特征在于,所述深度图像获取包括建立栅格图像、图像栅格赋值和图像归一化;所述建立栅格图像的尺寸为m
×
n,图像像素的边长为p
s
,图像尺寸与像素边长的关系如下式所示,下式所示,其中,p
s
的取值参照点云的平均点间;y
max
为深度图像y坐标最大值,y
min
为深度图像y坐标最小值,为深度图像x坐标最大值,为深度图像x坐标最小值;所述图像栅格赋值为计算落入栅格的点的数量,取落入栅格的点的z坐标值的平均值作为深度值,如下式所示,
其中,z
i,j
是图像i行j列栅格的深度值,n为落入该栅格的点的数量,为图像i行j列栅格的深度平均值;所述图像归一化为将深度值归一化到0到1,并输出为深度图像,如下式所示,其中,为图像i行j列栅格的深度平均值,为图像中最大平均深度值,为图像中最小平均深度值,g
i,j
表示深度值,范围是0-1。6.根据权利要求1所述的一种基于深度和灰度信息的鱼道裂缝智能检测方法,其特征在于,所述步骤二中,首先将融合图像进行分块,然后引入多个约束条件对图像子块进行类别判断,约束条件为与图像子块有关的局部约束条件和与整幅图像有关的全局约束条件,局部约束条件包括像素比例p(r,c)、局部灰度均值μ(r,c)、灰度均值差d(r,c)、灰度均值差,全局约束条件包括全局灰度均值μ和全局灰度标准差σ,将符合约束条件的判定为裂缝子块,执行最大熵阈值分割,否则判定为背景子块,直接将像素值设为0,最后合并所有分割后的子块图像,完成二维影像和深度图像的裂缝初步提取。7.根据权利要求6所述的一种基于深度和灰度信息的鱼道裂缝智能检测方法,其特征在于,当像素比例p(r,c)<0.1时,为裂缝子块;当同时满足0.3<p(r,c)≤0.4,μ(r,c)<μ σ/2,d(r,c)≥2σ,为裂缝子块;当同时满足0.4<p(r,c)≤0.5,μ(r,c)<μ-σ/,d(r,c)≥3σ,为裂缝子块;当同时满足0.5<p(r,c)≤0.6,μ(r,c)<μ σ,d(r,c)≥4σ,为裂缝子块;否则为背景子块,将像素值设为0。8.根据权利要求1所述的一种基于深度和灰度信息的鱼道裂缝智能检测方法,其特征在于,所述步骤三中,所述图像配准首先需要读取二维灰度影像和深度图像,然后通过标靶计算配准点坐标,标靶为预先放置在混凝土表面的高反射率贴片,接着利用配准点计算仿射变换参数,最后执行变换完成两幅图像的配准并输出图像。9.根据权利要求1所述的一种基于深度和灰度信息的鱼道裂缝智能检测方法,其特征在于,所述步骤五中,所述裂缝分类将裂缝分为横向裂缝、纵向裂缝和倾斜裂缝,通过计算裂缝最小外接矩形的斜率,当斜率为小于0.5时,为横向裂缝,当斜率为0.5-4时,为倾斜裂缝,当斜率为大于4时,为纵向裂缝。10.根据权利要求1所述的一种基于深度和灰度信息的鱼道裂缝智能检测方法,其特征在于,所述步骤五中,裂缝定量计算,首先需要进行像素标定,即解算单个像素对应的裂缝真实尺寸,然后提取裂缝骨架,最后进行裂缝长宽定量计算;裂缝长宽定量计算首先对裂缝骨架的像素点求和,该值即为裂缝的像素长度,再乘以通过像素标定求解的单位像素对应的裂缝真实长度,即可求出裂缝的真实长度;裂缝宽度定量计算为裂缝像素的面积除以裂缝像素长度即可求出裂缝的像素宽度,最后乘以标定后得出的单个像素对应的裂缝真实宽度,即可求出裂缝的真实宽度。
技术总结
本发明提供一种基于深度和灰度信息的鱼道裂缝智能检测方法,包括如下步骤:步骤一、数据预处理:采集二维影像和三维点云数据,并进行预处理;步骤二、裂缝粗提取:利用改进的最大熵方法,提取二维灰度影像和深度图像中的裂缝;步骤三、图像配准与融合判断:基于特征点进行图像配准,对裂缝像素进行判断,当且仅当该像素点在二维灰度影像和深度图像中同时为裂缝时,判断为真裂缝点,否则为背景点;步骤四、裂缝精提取:利用连通域分析法去除较大的裂缝噪点,然后利用形态学处理方法去除裂缝的毛刺和连接断裂的裂缝;步骤五、裂缝分类与定量计算:对裂缝进行分类,对裂缝的长度和宽度进行定量计算。该检测方法能够更加准确和高效的定量化检测裂缝。量化检测裂缝。量化检测裂缝。
技术研发人员:石小涛 陈小龙 邓星勇 蔡显赫 谭均军 刘帅
受保护的技术使用者:三峡大学
技术研发日:2022.10.28
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。