技术特征:
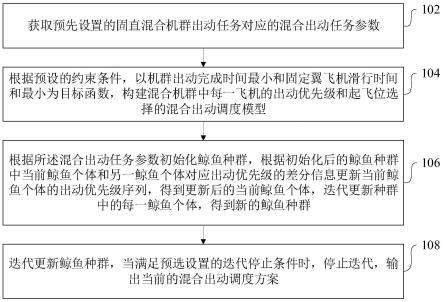
1.一种基于鲸鱼算法的固直混合机群起飞调度方法,其特征在于,所述方法包括:获取预先设置的固直混合机群出动任务对应的混合出动任务参数;所述混合出动任务参数包括混合机群中每一飞机的飞机类型、固定翼飞机的起飞位对应的第一起飞位集合和直升机的起飞位对应的第二起飞位集合;根据预设的约束条件,以机群出动完成时间最小和固定翼飞机滑行时间和最小为目标函数,构建混合机群中每一飞机的出动优先级和起飞位选择的混合出动调度模型;根据所述混合出动任务参数初始化鲸鱼种群,根据初始化后的鲸鱼种群中当前鲸鱼个体和另一鲸鱼个体对应出动优先级的差分信息更新当前鲸鱼个体的出动优先级序列,得到更新后的当前鲸鱼个体,迭代更新种群中的每一鲸鱼个体,得到新的鲸鱼种群;迭代更新鲸鱼种群,当满足预选设置的迭代停止条件时,停止迭代,输出当前的混合出动调度方案;所述混合出动调度方案用于进行固直混合机群的起飞出动调度。2.根据权利要求1所述的方法,其特征在于,在根据初始化后的鲸鱼种群中当前鲸鱼个体和另一鲸鱼个体对应出动优先级的差分信息更新当前鲸鱼个体的出动优先级序列之前,包括:对初始化后的种群中的每一鲸鱼个体执行解码操作,并根据个体解码后生成的混合出动调度方案和适应度函数计算每一鲸鱼个体的适应度函数值,得到最优鲸鱼个体;所述适应度函数包括机群出动完成时间和固定翼飞机滑行时间和;所述解码操作包括:提取当前鲸鱼个体对应的出动优先级信息和起飞位选择信息以初始化待调度集合,并初始化已调度集合和已执行工序记录;所述已执行工序记录是记录初始化的待调度集合中每一待调度飞机已执行工序的矩阵;根据当前待调度飞机对应的所述起飞位编号,判断待调度飞机的所述飞机类型,根据所述飞机类型执行对应的出动离场工序;根据所述已执行工序选择所述待调度飞机的下一阶段,当待调度飞机完成起飞出动阶段后,更新所述待调度飞机对应的已执行工序记录、待调度集合和已调度集合;迭代更新所述已执行工序记录、所述待调度集合和所述已调度集合,当满足预设的迭代终止条件时,停止迭代,输出混合出动调度方案;所述混合出动调度方案包括混合出动时序方案和起飞位分配方案。3.根据权利要求2所述的方法,其特征在于,根据初始化后的鲸鱼种群中当前鲸鱼个体和另一鲸鱼个体对应出动优先级的差分信息更新当前鲸鱼个体的出动优先级序列,得到更新后的当前鲸鱼个体的步骤,包括:根据随机数与预先设置的觅食方式选择阈值的大小关系,确定当前鲸鱼个体的觅食方式;所述觅食方式包括收缩包围觅食、泡泡网觅食和随机游捕;若当前鲸鱼个体的觅食方式为所述收缩包围觅食,获取初始化后的鲸鱼种群的最优鲸鱼个体,利用第一协作参与度获取当前鲸鱼个体和最优鲸鱼个体对应出动优先级的差分信息,根据所述差分信息更新当前鲸鱼个体的出动优先级序列,得到更新后的当前鲸鱼个体;所述收缩包围觅食的数学模型为:
其中,为的出动优先级序列,为当前鲸鱼个体,为的出动优先级序列,为最优鲸鱼个体,f为第一协作参与度,d
′
max
为个体最大维度,α为学习维度,s
′
为学习因子,t为当前迭代次数,t为最大迭代次数,[
·
]为取整运算;若当前鲸鱼个体的觅食方式为所述泡泡网觅食,获取初始化后的鲸鱼种群的最优鲸鱼个体,利用第二协作参与度获取当前鲸鱼个体和最优鲸鱼个体对应出动优先级的差分信息,根据所述差分信息更新当前鲸鱼个体的出动优先级序列,得到更新后的当前鲸鱼个体;所述收缩包围觅食的数学模型为:其中,f
′
为第二协作参与度,f
′
=|[d
′
max
·
e
bl
·
cos(2πl)]|,b是常数,用来定义螺线的形状,l是(-1,1)中的随机数,[
·
]表示取整,|
·
|表示绝对值;若当前鲸鱼个体的觅食方式为所述随机游捕,利用第一协作参与度获取当前鲸鱼个体和随机鲸鱼个体对应出动优先级的差分信息,根据所述差分信息更新当前鲸鱼个体的出动优先级序列,得到更新后的当前鲸鱼个体;所述收缩包围觅食的数学模型为:其中,为的出动优先级序列,为随机鲸鱼个体。4.根据权利要求1所述的方法,其特征在于,根据所述混合出动任务参数初始化鲸鱼种群的步骤,包括:根据混合机群中每一飞机的飞机类型、所述第一起飞位集合和所述第二起飞位集合,为每一飞机分配对应的起飞位,得到起飞位选择序列;根据每一飞机起飞的先后顺序,得到出动优先级序列;对所述起飞位选择序列和所述出动优先级序列进行编码,得到鲸鱼个体;随机生成的多个鲸鱼个体以初始化鲸鱼种群。5.根据权利要求3-4任一项所述的方法,其特征在于,所述根据所述差分信息更新当前鲸鱼个体的出动优先级序列,得到更新后的当前鲸鱼个体包括:根据所述差分信息更新当前鲸鱼个体的出动优先级序列,将更新后的出动优先级序列和当前鲸鱼个体对应的起飞位选择序列进行重组,得到更新后的当前鲸鱼个体。6.根据权利要求5所述的方法,其特征在于,所述方法还包括:当鲸鱼种群的最优鲸鱼个体累计l代依然没有更新时,采用多策略分层重构机制,进行种群重启;所述多策略分层重构机制包括:获取鲸鱼种群个体数,并将鲸鱼种群中的鲸鱼个体分为多层;获取当前迭代次数下的鲸鱼种群的最优鲸鱼个体和每一鲸鱼个体的历史最优解;对所述最优鲸鱼个体中的起飞位选择序列和出动优先级序列分别执行变异操作,对变异后的起飞位选择序列和出动优先级序列进行重组以更新奇数层的鲸鱼个体;
对所述每一鲸鱼个体的历史最优解中的起飞位选择序列和出动优先级序列分别执行变异操作,对变异后的起飞位选择序列和出动优先级序列进行重组,更新偶数层的鲸鱼个体;根据更新后的鲸鱼个体,得到新的种群。7.根据权利要求4所述的方法,其特征在于,所述方法还包括:根据所述随机生成的多个鲸鱼个体对应的出动优先级序列和起飞位选择序列,对每一飞机出动过程中存在停机位与起飞位干涉的情况进行预先检索,并根据检索结果调整对应鲸鱼个体的出动优先级序列,以完成对鲸鱼个体出动优先级的预约束。8.根据权利要求1所述的方法,其特征在于,所述预设的约束条件包括混合机群的飞机时序规划约束、空间资源约束和起飞出动调度约束;所述飞机时序规划约束包括转运作业时序约束、保障作业时序约束、转运作业和保障作业之间的衔接约束以及面向固定翼飞机的偏流板冷却复位时间间隔约束;所述空间资源约束包括多机转运避碰约束和占用相同空间优先级约束;所述起飞出动调度约束包括起飞间隔约束、起飞位选择约束以及面向固定翼飞机的等待位与起飞位匹配约束和起飞构型约束。9.一种基于鲸鱼算法的固直混合机群起飞调度装置,其特征在于,所述装置包括:参数获取模块,用于获取预先设置的固直混合机群出动任务对应的混合出动任务参数;所述混合出动任务参数包括混合机群中每一飞机的飞机类型、固定翼飞机的起飞位对应的第一起飞位集合和直升机的起飞位对应的第二起飞位集合;模型构建模块,用于根据预设的约束条件,以机群出动完成时间最小和固定翼飞机滑行时间和最小为目标函数,构建混合机群中每一飞机的出动优先级和起飞位选择的混合出动调度模型;模型优化模块,用于根据所述混合出动任务参数初始化鲸鱼种群,根据初始化后的鲸鱼种群中当前鲸鱼个体和另一鲸鱼个体对应出动优先级的差分信息更新当前鲸鱼个体的出动优先级序列,得到更新后的当前鲸鱼个体,迭代更新种群中的每一鲸鱼个体,得到新的鲸鱼种群;优化输出模块,用于迭代更新鲸鱼种群,当满足预选设置的迭代停止条件时,输出当前的混合出动调度方案;所述混合出动调度方案用于进行固直混合机群的起飞出动调度。10.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至8中任一项所述方法的步骤。
技术总结
本申请涉及一种基于鲸鱼算法的固直混合机群起飞调度方法、装置及设备。方法包括:构建混合机群中每一飞机的出动优先级和起飞位选择的混合出动调度模型;根据所述混合出动任务参数初始化鲸鱼种群,根据初始化后的鲸鱼种群中当前鲸鱼个体和另一鲸鱼个体对应出动优先级的差分信息更新当前鲸鱼个体的优先级序列,得到更新后的当前鲸鱼个体,迭代更新种群中的每一鲸鱼个体,得到新的鲸鱼种群;迭代更新鲸鱼种群,当满足预选设置的迭代停止条件时,输出当前的混合出动调度方案以进行固直混合机群的起飞出动调度。采用本方法能够快速配置固直混合机群的混合出动调度方案、提高最优解质量,以高效进行固直混合机群的起飞出动。以高效进行固直混合机群的起飞出动。以高效进行固直混合机群的起飞出动。
技术研发人员:刘子玄 苏析超 韩维 郁大照 刘玉杰 万兵 郭放 袁培龙
受保护的技术使用者:中国人民解放军海军航空大学
技术研发日:2022.11.09
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。