技术特征:
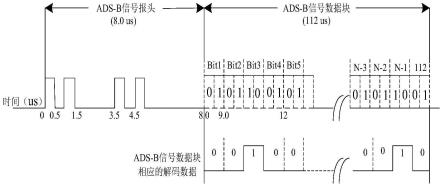
1.一种基于s模式的ads-b接收机系统的实现方法,其特征在于,包括以下步骤:步骤1、将从天线接收到的ads-b信号送入射频前端,然后通过带通滤波器滤掉其它干扰信号,最后经过低噪声放大器进行放大,送入混频器下变频到中频信号;步骤2、对中频信号进行检波,然后通过a/d转换电路对检波后的信号采样,ads-b信号由前导脉冲与数据域组成;步骤3、对基带数字信号进行处理,首先,检测ads-b信号报头,确定ads-b信号的存在性;其次,提取ads-b信号数据位并对其进行置信度判定;最后,检测ads-b信号数据位,如果检测出有错误的数据位,则纠正错误;步骤4、把经编码过的数据域消息变换成真实的数据域消息;步骤5、把经解码后的数据域消息显示到具体物理实体上。2.根据权利要求1所述的基于s模式的ads-b接收机系统的实现方法,其特征在于,在步骤3中,检测ads-b信号报头,确定ads-b信号的存在性具体包括以下步骤:
①
有效脉冲位置检测:如果一个采样点s的幅度值大于门限值,且其随后连续的n个采样点或更多采样点的值都在门限值以上,那么将采样点s的位置看做是一个有效脉冲位置;
②
上升沿检测:如果某个采样点是一个有效脉冲位置,且跟前一个采样点之间存在真实斜坡,与后一个采样点之间的幅度差异少于真实斜坡,那么此采样点可断定为一个上升沿;
③
报头脉冲检测:当检测到多个有模式s报头时间间隔的脉冲时,就开始进行报头检测,检测标准是:多个脉冲具有时序,上升沿个数≥2个,其余为有效脉冲位置;
④
计算参考功率值;
⑤
功率一致性测试:对ads-b消息报头更深入地确认,如果消息报头各脉冲的各个功率值之间的差距大于一定阈值,则此侦ads-b消息脉冲被噪声污染,丢弃该报头,重新处理下一个报头;
⑥
通过df认证对ads-b消息的可靠性进行进一步的确认,其中df为ads-b消息中数据域的前x个比特位;
⑦
再触发:检测到一个ads-b消息报头后,继续由报头检测过程来寻找后续ads-b消息报头;当检测到有交迭的报头时,则将它的参考功率值与正在处理信号的参考功率值进行比较,如果前者比后者高一定幅度,那么丢弃正在处理的信号,开始处理新检测到的信号;否则丢弃新检测到的报头,继续处理当前信号。3.根据权利要求2所述的基于s模式的ads-b接收机系统的实现方法,其特征在于,在步骤
④
中,参考功率值的计算方法具体包括以下步骤:i、确定计算参考功率值所需要的采样点:首先,在多个前导脉冲采样点中,选择与ads-b消息报头时序匹配的采样点集合;其次,对符合报头时序的脉冲,在脉冲上升沿后选择m个样点,选择后的采样点集合为si=si(i=1,2
…
,3n,n=2,3,4);ii、对采样点集合中的采样点si(i=1,2
…
,3n,n=2,3,4),分别找出在一定摆幅内的采样点数目ci(i=1,2
…
,3n,n=2,3,4),然后从ci(i=1,2
…
,3n,n=2,3,4)中找出某个最大值cmax,如果cmax是唯一的,那么产生cmax的采样点si的值就作为消息报头参考功率值。4.根据权利要求3所述的基于s模式的ads-b接收机系统的实现方法,其特征在于,在步骤ii中,如果出现2个或2个以上的采样点的cmax值相同的情况,则假设产生cmax值的采样
点集合为smax=sm(m∈i,=1,2
…
,3n,n=2,3,4);从集合smax中找出最小值点sj,再从smax中去掉比sj大一定摆幅以上的点,最后计算出集合内剩余点的平均值,将平均值作为消息报头的参考功率值。5.根据权利要求2或3或4所述的基于s模式的ads-b接收机系统的实现方法,其特征在于,所述步骤
⑥
具体包括以下步骤:i、ads-b消息数据域的前5个比特位,每个比特位的两个码片chip均持续一定时间,对某一个码片chip的采样点来说,如果在其上升沿或上升沿
±
1个样点时间内,存在一个有效脉冲位置,则认为检测到一个数据脉冲;检测到有效脉冲位置后进入下一个步骤,否则丢弃;ii、利用每个有效脉冲位置后的3个采样点,分别求出每个代码所用采样点的平均值,然后用所得到的平均值和参考功率值比较;比较方法为:如果有等于大于3个代码的平均值在参考功率值的
±
3db以下,则这侦消息通过df认证,否则丢弃该侦消息。6.根据权利要求5所述的基于s模式的ads-b接收机系统的实现方法,其特征在于,在步骤3中,提取ads-b信号数据位并对其进行置信度判定在时域中处理,即对ads-b数字信息进行形状分析,得出其代码位和代码位置信度,所用的算法是振幅比较法,振幅比较法利用每一个数据位的10个采样点的信息与报头检测中得出的参考功率值之间的关系来确定数据位和数据位的置信度;具体包括以下步骤:1)假设每个比特位的10个采样值点用s0,s1,s2,s3,s4,s5,s6,s7,s8,s9来表示,同时将每个比特位的两个chip用chip1和chip0来表示,chip1包含比特位的前五个采样点,记为s
chip1
=s0,s1,s2,s3,s4,chip0包含比特位的后五个采样点,记为s
chip0
=s5,s6,s7,s8,s9;2)对每个比特位的10个采样点,依次求出采样点幅度值在参考功率值正负3db范围之内的点集合,chip1中点用chip1_a表示,chip0中点用chip0_a表示,用公式表示为:chip1_a=s
i
,|s
i-power_ref|≤3db,s
i
∈s
chip1
chip0_a=s
i
,|s
i-power_ref|≤3db,s
i
∈s
chip0
3)对同样的采样点集合,求出采样点幅度值比参考功率值小6db以上的点集合,chip1中点用chip1_b表示,chip0中点用chip0_b表示,用公式表示为:chip1_b=s
i
,power_ref-s
i
>6db,s
i
∈s
chip1
chip0_b=s
i
,power_ref-s
i
>6db,s
i
∈s
chip0
4)对chip1_a、chip0_a、chip1_b、chip0_b这4个集合中的点进行加权运算,其中s0,s4,s5,s9的权重为1,s1,s2,s3,s6,s7,s8的权重为2;5)计算代码为0或1的可能性值,分别记为score0和score1:score1=w_chip1_a-w_chip0_a w_chip0_b-w_chip1_bscore0=w_chip0_a-w_chip1_a w_chip1_b-w_chip0_b6)推断比特位和置信度的大小:比特位推断:比较score0和score1的大小,如果score1大于score0则该代码位的值为
‘1’
,否则该代码位的值为
‘0’
;当两个相等时,该代码位的值为
‘0’
;比特位置信度推断:如果score0、score1的两个值的差大于或等于3,则推断该位代码的值有较高的置信度,记为
‘1’
,否则有较低的置信度,记为
‘0’
;这样就得到了ads-b信号每个数据位的值和每个数据位对应的置信度信息。7.根据权利要求6所述的基于s模式的ads-b接收机系统的实现方法,其特征在于,在步
骤3中,检测ads-b信号数据位,如果检测出有错误的数据位,则纠正错误包括:首先采用crc校验电路对其进行检错处理,如果检出有错,则基于数据位置信度判定结果结合crc校验结果找出错误的数据位,然后采用一定的纠错技术对其进行纠错;具体包括以下步骤:a、将每个数据位经过crc校验电路,通过和模二网络得到一个错误校正子,如果该错误校正子为0,则表示ads-b消息没有错误;如果不为0,则进行下一步处理;b、找出所有低置信度数据位并统计其个数,如果低置信度数据位的个数超过一定阈值,则丢弃该ads-b消息,否则进行下一步处理。c、尝试组合所有低置信度数据位对应的位校正子,位校正子即是某个位是1,其它位均为0的二进制数字流通过crc校验电路后的余数,找出与错误校正子匹配的那个组合,然后把这个组合校正子对应的那些低置信度数据位取反即完成纠错。8.根据权利要求1或7所述的基于s模式的ads-b接收机系统的实现方法,其特征在于,步骤4具体包括以下步骤:a、首先开辟内存空间,以存储检错纠错模块输出的ads-b数据,并判断其数据格式是否符合要求,如果符合要求,则提取ads-b消息中的icao值,并将其处理转换为符合asterix010要求的格式并储存;b、提取消息格式type值以判断ads-b消息类型,根据type值分别处理各类消息;c、空中位置消息解码:首先提取高度信息,将其处理转换为符合asterix010标准的数据格式并储存;接着提取紧凑式位置报告cpr格式和经纬度信息并根据cpr格式判断信息的奇偶性;然后提取一对一奇一偶的相同信息来源的经纬度信息进行解码计算,并判断奇偶经纬度信息的经度区域数值nl是否相等,如不相等,则等待直到相等为止;最后将相等的nl经纬度信息进行极坐标转换处理,并转换为符合asterix010标准的数据格式进行储存;d、飞机状态及id信息解码:提取飞机id信息,使用紧凑编码算法进行解码处理,将处理结果转换为符合asterix010标准的数据格式并进行储存;e、空中速度信息解码,具体包括:e1、提取导航精度值nac,将其转换为符合asterix010标准的数据格式并进行储存;e2、提取空中信息的子类型subtype;e3、根据子类型的值计算航速航向,将结果转换为符合asterix010标准的数据格式并进行储存;f、判断asterix数据帧是否填充完毕,填充完毕后则进行发送。9.根据权利要求8所述的基于s模式的ads-b接收机系统的实现方法,其特征在于,在步骤4中,所述数据域消息的子字段包括类型、高度、经度、纬度和速度。10.一种基于s模式的ads-b接收机系统,其特征在于,包括:天线及l波段接收模块,用于将从天线接收到的ads-b信号送入射频前端,然后通过带通滤波器滤掉其它干扰信号,最后经过低噪声放大器进行放大,送入混频器下变频到中频信号;中频检波及a/d转换电路模块,用于对中频信号进行检波,然后通过a/d转换电路对检波后的信号采样;基带数字信号处理模块,具体包括ads-b消息报头检测模块、数据位拾取和置信度分析模块以及检错纠错模块,其中,所述ads-b消息报头检测模块用于检测ads-b信号报头,确定
ads-b信号的存在性,数据位拾取和置信度分析模块用于提取ads-b信号数据位并对其进行置信度判定,所述检错纠错模块用于检测ads-b信号数据位,如果检测出有错误的数据位,则纠正错误;ads-b消息解码处理模块,用于把经编码过的数据域消息变换成真实的数据域消息;消息显示处理模块,用于把经解码后的导航消息显示到具体物理实体上。
技术总结
本发明公开了一种基于S模式的ADS-B接收机系统的实现方法,包括以下步骤:将从天线接收到的ADS-B信号送入射频前端,输出ADS-B视频信号;对中频信号进行检波,然后通过A/D转换电路对检波后的信号采样;对基带数字信号进行处理;把经编码过的数据域消息变换成真实的数据域消息;把经解码后的数据域消息显示到具体物理实体上;本发明还公开了一种基于S模式的ADS-B接收机系统;本发明能有效地改善近距离飞机的分辨率、保证更高的接收数据完整性和可靠性、增强航空器飞行的安全性。靠性、增强航空器飞行的安全性。靠性、增强航空器飞行的安全性。
技术研发人员:张超 刘春鹏 刘良涛 刘磊
受保护的技术使用者:成都华日通讯技术股份有限公司
技术研发日:2022.10.28
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。