技术特征:
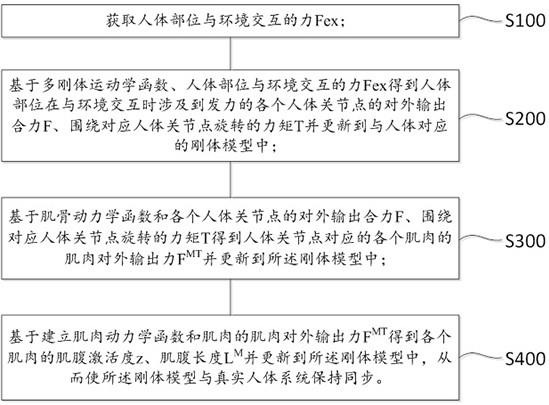
1.一种数字孪生虚拟人与人体的交互方法,其特征在于,包括以下步骤:获取人体部位与环境交互的力fex;基于多刚体运动学函数、人体部位与环境交互的力fex得到人体部位在与环境交互时涉及到发力的各个人体关节点的对外输出合力f、围绕对应人体关节点旋转的力矩t并更新到与人体对应的刚体模型中;基于肌骨动力学函数和各个人体关节点的对外输出合力f、围绕对应人体关节点旋转的力矩t得到人体关节点对应的各个肌肉的肌肉对外输出力f
mt
并更新到所述刚体模型中;基于建立肌肉动力学函数和肌肉的肌肉对外输出力f
mt
得到各个肌肉的肌腹激活度z、肌腹长度l
m
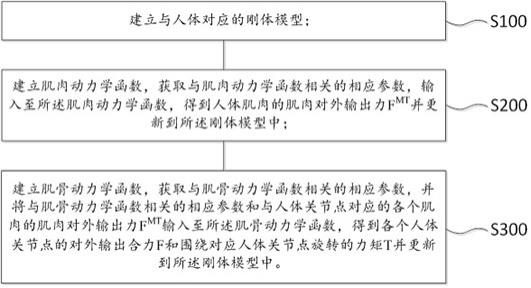
并更新到所述刚体模型中,从而使所述刚体模型与真实人体系统保持同步。2.根据权利要求1所述的数字孪生虚拟人与人体的交互方法,其特征在于,与人体对应的刚体模型的建立步骤具体包括:获取与人体对应的刚体模型,获取人体图像,计算所述人体图像中与所述刚体模型中刚体关节点相对应的人体关节点之间的图像距离,根据所述图像距离计算所述人体关节点对应的肢体长度数据l,将与所述人体关节点对应的肢体长度数据l更新到所述刚体模型中,并获取所述人体图像中所述人体关节点的关节夹角θ更新到所述刚体模型中。3.根据权利要求1所述的数字孪生虚拟人与人体的交互方法,其特征在于,所述肌肉动力学函数具体为肌腹激活度z、肌腹长度l
m
、其他相应参数对应人体肌肉的肌肉对外输出力f
mt
的肌肉动力学函数;其中,与肌肉动力学函数相关的其他相应参数的具体值为已知;所述肌骨动力学函数具体为人体关节点对应的各个肌肉的肌肉对外输出力f
mt
、其他相应参数对应人体关节点的对外输出合力f、围绕对应人体关节点旋转的力矩t的肌骨动力学函数;其中,与肌骨动力学函数相关的其他相应参数的具体值为已知;所述多刚体运动学函数具体为人体部位在与环境交互时涉及到发力的各个人体关节点的对外输出合力f、围绕对应人体关节点旋转的力矩t、其他相应参数对应人体部位与环境交互的力fex的多刚体运动学函数;其中,与多刚体运动学函数相关的其他相应参数的具体值为已知。4.根据权利要求3所述的数字孪生虚拟人与人体的交互方法,其特征在于,肌腹激活度z、肌腹长度l
m
、其他相应参数对应人体肌肉的肌肉对外输出力f
mt
的肌肉动力学函数具体为:人体各个肌肉的肌肉对外输出力f
mt
与相应的肌肉长度l
mt
、肌腹长度l
m
、肌肉被动拉伸最大长度l
st
、肌纤维夹角α、肌肉主动收缩最小长度l
sr
、肌腹收缩刚度k
pe
、肌腱刚度k
t
、肌腹最大发力、肌腹激活度z的肌肉动力学函数,其中,肌肉长度l
mt
、肌肉被动拉伸最大长度l
st
、肌纤维夹角α、肌肉主动收缩最小长度l
sr
、肌腹收缩刚度k
pe
、肌腱刚度k
t
、肌腹最大发力的具体值为已知。5.根据权利要求4所述的数字孪生虚拟人与人体的交互方法,其特征在于,人体各个肌肉的肌肉对外输出力f
mt
与相应的肌肉长度l
mt
、肌腹长度l
m
、肌肉被动拉伸最大长度l
st
、肌纤维夹角α、肌肉主动收缩最小长度l
sr
、肌腹收缩刚度k
pe
、肌腱刚度k
t
、肌腹最大发力、肌腹激活度z的肌肉动力学函数具体包括:
基于肌肉力学模型得到的肌肉对外输出力f
mt
和肌腱对外输出力f
t
、肌腹对外输出力f
m
的关系,建立肌肉对外输出力f
mt
与肌腱对外输出力f
t
以及与相应的肌腱刚度k
t
、肌肉长度l
mt
、肌腹长度l
m
、肌肉被动拉伸最大长度l
sr
的第一肌肉动力学函数,肌肉对外输出力f
mt
与肌腹对外输出力f
m
以及与相应的肌腹激活度z、肌腹最大发力、肌腹收缩刚度k
pe
、肌腹长度l
m
、肌肉主动收缩最小长度l
sr
的第二肌肉动力学函数。6.根据权利要求5所述的数字孪生虚拟人与人体的交互方法,其特征在于,所述第一肌肉动力学函数为:,;第二肌肉动力学函数为:,,,;式中,f
mt
表示肌肉对外输出力,f
m
表示肌肉中的肌腹对外输出力,f
t
表示肌肉中的肌腱对外输出力,表示肌肉力学模型中用于定义肌腹的弹簧发力,表示肌肉力学模型中用于定义肌腹的执行器发力,k
t
表示肌腱刚度,k
pe
表示肌腹收缩刚度,表示肌腹最大发力,l
st
表示肌肉被动拉伸最大长度,表示肌肉主动收缩最小长度,l
m
表示肌腹长度,z表示肌腹激活度,l
mt
表示肌肉长度,α表示肌纤维夹角。7.根据权利要求3所述的数字孪生虚拟人与人体的交互方法,其特征在于,人体关节点对应的各个肌肉的肌肉对外输出力f
mt
、其他相应参数对应人体关节点的对外输出合力f、围绕对应人体关节点旋转的力矩t的肌骨动力学函数具体包括:人体关节点的对外输出合力f和与人体关节点对应的各个肌肉的肌肉对外输出力f
mt
的第一肌骨动力学函数;围绕人体关节点旋转的力矩t和与人体关节点对应的各个肌肉的肌肉对外输出力f
mt
、肌肉对应的肌腱与骨骼的连接点到对应的人体关节点之间的距离数据w
mt
的第二肌骨动力学函数,其中,肌肉的肌腱与骨骼的连接点到对应的人体关节点之间的距离数据w
mt
为已知。8.根据权利要求7所述的数字孪生虚拟人与人体的交互方法,其特征在于,所述第一肌骨动力学函数为:,其中,分别表示与人体关节点对应的各个肌肉的肌肉对外输出力,f表示人体关节点的对外输出合力,i的数值根据相应人体关节点对应的肌肉个数确定;所述第二肌骨动力学函数为:,其中,分别表示与人体关节点对应的各个肌肉的肌肉对外输出力,分别表示对应肌肉的肌腱与骨骼的连接点到对应人体关节点之间的距离数据,t表示围绕人体关节点旋转的力矩,i的数值根据相应人体关节点对应的肌肉个数确定。9.根据权利要求3所述的数字孪生虚拟人与人体的交互方法,其特征在于,人体部位在与环境交互时涉及到发力的各个人体关节点的对外输出合力f、围绕对应人体关节点旋转的力矩t、其他相应参数对应人体部位与环境交互的力fex的多刚体运动学函数具体为:人体部位与环境交互的力fex、人体部位在与环境交互时涉及到发力的各个人体关节点的对外输出合力f、围绕对应人体关节点旋转的力矩t、对应人体关节点的关节夹角θ和与对应人体关节点对应的肢体长度数据l的多刚体运动学函数;其中,人体关节点的关节夹角
θ和与对应人体关节点对应的肢体长度数据l的具体值为已知。10.根据权利要求3所述的数字孪生虚拟人与人体的交互方法,其特征在于,在得到肌腹激活度z、肌腹长度l
m
后,还包括以下步骤:判断肌腹激活度z是否大于肌腹最大发力对应的激活度阈值;若是则执行保护动作或进行风险提示,防止人体肌肉受到损害;判断肌腹长度l
m
是否大于肌肉的自身最大被动伸展长度l
st
或小于最小主动收缩长度,若是则执行保护动作或风险提示,防止人体肌肉受到损害。11.一种数字孪生虚拟人与人体的交互系统,其特征在于,包括以下模块:获取模块,获取人体部位与环境交互的力fex;多刚体运动学交互模块,基于多刚体运动学函数、人体部位与环境交互的力fex得到人体部位在与环境交互时涉及到发力的各个人体关节点的对外输出合力f、围绕对应人体关节点旋转的力矩t并更新到与人体对应的刚体模型中;肌骨动力学交互模块,基于肌骨动力学函数和各个人体关节点的对外输出合力f、围绕对应人体关节点旋转的力矩t得到人体关节点对应的各个肌肉的肌肉对外输出力f
mt
并更新到所述刚体模型中;肌肉运动学交互模块,基于建立肌肉动力学函数和肌肉的肌肉对外输出力f
mt
得到各个肌肉的肌腹激活度z、肌腹长度l
m
并更新到所述刚体模型中,从而使所述刚体模型与真实人体系统保持同步。12.一种电子设备,其特征在于,包括:至少一个处理器,与至少一个所述处理器通信连接的存储器;至少一个所述处理器用于读取所述存储器中的程序,用于执行如权利要求1-10中任一项所述方法。13.一种健身设备,其特征在于,包括:至少一个处理器,与至少一个所述处理器通信连接的存储器;至少一个所述处理器用于读取所述存储器中的程序,用于执行如权利要求1-10中任一项所述方法。14.一种计算机可读存储介质,其特征在于,所述介质上存储有指令,当所述指令在计算机上运行时,使得计算机执行如权利要求1-10任一项所述的方法。
技术总结
本发明涉及人工智能技术领域,具体为一种数字孪生虚拟人与人体的交互方法、系统、电子设备,基于多刚体运动学函数得到人体部位在与环境交互时涉及到发力的各个人体关节点的对外输出合力F、围绕对应人体关节点旋转的力矩T,基于肌骨动力学函数和各个人体关节点的对外输出合力F、围绕对应人体关节点旋转的力矩T得到人体关节点对应的各个肌肉的肌肉对外输出力F
技术研发人员:孙相宇 刘文迅 江军
受保护的技术使用者:杭州轻宇宙科技有限公司
技术研发日:2022.11.28
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。