技术特征:
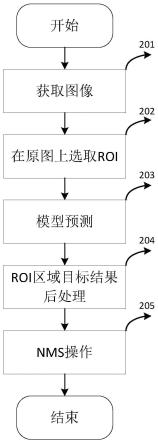
1.一种基于深度学习的检测小目标的方法,其特征在于,包括以下步骤:训练生成基于深度学习的目标检测模型;获取待检测图像,并从所述待检测图像中选取感兴趣区域,所述感兴趣区域包括需要进行小目标检测的矩形区域;利用所述目标检测模型对所述待检测图像以及所述感兴趣区域图像进行模型预测,获取在所述待检测图像原始尺寸下和感兴趣区域图像尺寸下的目标类别和位置。2.根据权利要求1所述的基于深度学习的检测小目标的方法,其特征在于,所述方法还包括:对所述待检测图像尺寸下和感兴趣区域图像尺寸下的目标检测结果进行非最大值抑制操作,得到最终的目标检测结果。3.根据权利要求1所述的基于深度学习的检测小目标的方法,其特征在于,获取待检测图像的过程包括:获取采集到的视频流;对采集的视频流进行解码,得到所述待检测图像。4.根据权利要求1所述的基于深度学习的检测小目标的方法,其特征在于,所述方法还包括:对感兴趣区域图像上的目标检测结果进行筛选,并剔除预先区域的目标,以及将剩余目标的坐标映射至所述待检测图像。5.一种基于深度学习的检测小目标的系统,其特征在于,包括有:视频图像采集模块,用于获取采集到的视频流,并对采集的视频流进行解码,得到所述待检测图像;选取感兴趣区域模块,用于从所述待检测图像中选取感兴趣区域;所述感兴趣区域包括需要进行小目标检测的矩形区域;深度学习检测模块,用于利用预先训练的目标检测模型对所述待检测图像以及所述感兴趣区域图像进行模型预测,获取在所述待检测图像尺寸下和感兴趣区域图像尺寸下的目标检测结果;结果输出模块,用于对检测到的所有目标进行筛选,得到最终的目标检测结果。6.根据权利要求5所述的基于深度学习的检测小目标的系统,其特征在于,所述系统还包括有:模型训练模块,用于基于深度学习训练生成目标检测模型。7.根据权利要求5所述的基于深度学习的检测小目标的系统,其特征在于,所述系统还包括:对感兴趣区域图像上的目标检测结果进行筛选,并剔除预先区域的目标,以及将剩余目标的坐标映射至所述待检测图像。
技术总结
本发明提供一种基于深度学习的检测小目标的方法及系统,通过训练生成基于深度学习的目标检测模型;获取待检测图像,并从所述待检测图像中选取感兴趣区域;利用所述目标检测模型对所述待检测图像以及所述感兴趣区域图像进行模型预测,获取在所述待检测图像尺寸下和感兴趣区域图像尺寸下的目标检测结果。本发明通过利用基于深度学习的目标检测算法进行初步的检测,通过选取ROI的方式进行二次检测可显著提高小目标的检测精度。本发明提出了一种可动态调整的选取ROI区域的方法,通过对ROI区域进行二次检测并对所有检测结果进行整合筛选从而得到最终的检测结果,显著提高了小目标的检测精度。的检测精度。的检测精度。
技术研发人员:吕阿斌 张雨
受保护的技术使用者:中兴飞流信息科技有限公司
技术研发日:2022.11.10
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。