技术特征:
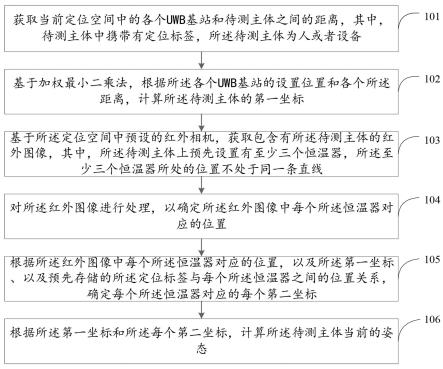
1.一种基于uwb的位姿确定方法,其特征在于,包括:获取当前定位空间中的各个uwb基站和待测主体之间的距离,其中,待测主体中携带有定位标签,所述待测主体为人或者设备;基于加权最小二乘法,根据所述各个uwb基站的设置位置和各个所述距离,计算所述待测主体的第一坐标;基于所述定位空间中预设的红外相机,获取包含有所述待测主体的红外图像,其中,所述待测主体上预先设置有至少三个恒温器,所述至少三个恒温器所处的位置不处于同一条直线;对所述红外图像进行处理,以确定所述红外图像中每个所述恒温器对应的位置;根据所述红外图像中每个所述恒温器对应的位置,以及所述第一坐标、以及预先存储的所述定位标签与每个所述恒温器之间的位置关系,确定每个所述恒温器对应的每个第二坐标;根据所述第一坐标和所述每个第二坐标,计算所述待测主体当前的姿态。2.根据权利要求1所述的方法,其特征在于,在所述基于加权最小二乘法,根据所述各个uwb基站的设置位置和各个所述距离,计算所述待测主体的第一坐标之后,还包括: 根据预先收集的多个基站组网对应的样本数据,构建dop 数值分析模型,其中,每个所述基站组网对应的属性信息至少包含了基站的形状、数量、高度以及位置分布,所述预先收集的多个基站组网为煤矿井下中多个各个预先标记为狭长定位空间的各个空间中设置的基站组网;基于所述第一坐标配置卡尔曼滤波定位模型的观测值;根据所述dop 数值分析模型,以及所述当前定位空间对应的场景信息,以及所述当前定位空间对应的基站组网信息,确定所述当前定位空间对应的dop值,并基于所述dop值配置所述卡尔曼滤波定位模型的观测噪声协方差参考值;根据所述观测噪声协方差参考值、所述观测值,以及所述卡尔曼滤波定位模型,对当前所述第一坐标进行修正。3.根据权利要求1所述的方法,其特征在于,所述获取当前定位空间中的各个uwb基站和待测主体之间的距离,包括:基于双边双向测距算法,测每个uwb 基站与所述待测主体之间的距离。4.根据权利要求1所述的方法,其特征在于,在所述计算所述待测主体当前的姿态之后,还包括:响应于所述第一坐标和所述每个第二坐标中的任一坐标为目标区域坐标,发出警报,其中,所述目标区域坐标为与所述当前定位空间对应的危险空间对应的坐标。5.根据权利要求1所述的方法,其特征在于,在所述计算所述待测主体当前的姿态之后,还包括:根据所述当前定位空间对应的场景信息,以及所述待测主体的类型,确定与所述类型对应的危险动作特征;确定每个所述危险动作特征对应的危险姿态信息;在所述待测主体当前的姿态与所述危险姿态信息之间的相似度大于预设阈值时,发出警报。
6.一种基于uwb的位姿确定装置,其特征在于,包括:第一获取模块,用于获取当前定位空间中的各个uwb基站和待测主体之间的距离,其中,待测主体中携带有定位标签,所述待测主体为人或者设备;第一计算模块,用于基于加权最小二乘法,根据所述各个uwb基站的设置位置和各个所述距离,计算所述待测主体的第一坐标;第二获取模块,用于基于所述定位空间中预设的红外相机,获取包含有所述待测主体的红外图像,其中,所述待测主体上预先设置有至少三个恒温器,所述至少三个恒温器所处的位置不处于同一条直线;处理模块,用于对所述红外图像进行处理,以确定所述红外图像中每个所述恒温器对应的位置;确定模块,用于根据所述红外图像中每个所述恒温器对应的位置,以及所述第一坐标、以及预先存储的所述定位标签与每个所述恒温器之间的位置关系,确定每个所述恒温器对应的每个第二坐标;第二计算模块,用于根据所述第一坐标和所述每个第二坐标,计算所述待测主体当前的姿态。7.根据权利要求6所述的装置,其特征在于,所述第一计算模块,还用于:根据预先收集的多个基站组网对应的样本数据,构建dop 数值分析模型,其中,每个所述基站组网对应的属性信息至少包含了基站的形状、数量、高度以及位置分布,所述预先收集的多个基站组网为煤矿井下中多个各个预先标记为狭长定位空间的各个空间中设置的基站组网;基于所述第一坐标配置卡尔曼滤波定位模型的观测值;根据所述dop 数值分析模型,以及所述当前定位空间对应的场景信息,以及所述当前定位空间对应的基站组网信息,确定所述当前定位空间对应的dop值,并基于所述dop值配置所述卡尔曼滤波定位模型的观测噪声协方差参考值;根据所述观测噪声协方差参考值、所述观测值,以及所述卡尔曼滤波定位模型,对当前所述第一坐标进行修正。8.根据权利要求6所述的装置,其特征在于,所述第一获取模块,具体用于:基于双边双向测距算法,测每个uwb 基站与所述待测主体之间的距离。9.根据权利要求6所述的装置,其特征在于,所述第二计算模块,还用于:响应于所述第一坐标和所述每个第二坐标中的任一坐标为目标区域坐标,发出警报,其中,所述目标区域坐标为与所述当前定位空间对应的危险空间对应的坐标。10.根据权利要求6所述的装置,其特征在于,所述第二计算模块,还用于:根据所述当前定位空间对应的场景信息,以及所述待测主体的类型,确定与所述类型对应的危险动作特征;确定每个所述危险动作特征对应的危险姿态信息;在所述待测主体当前的姿态与所述危险姿态信息之间的相似度大于预设阈值时,发出警报。
技术总结
本公开提出一种基于UWB的位姿确定方法和装置,涉及矿井安全技术领域。该方法包括:获取当前定位空间中的各个UWB基站和待测主体之间的距离;根据各个UWB基站的设置位置和各个距离,计算待测主体的第一坐标;基于定位空间中预设的红外相机,获取包含有待测主体的红外图像;对红外图像进行处理,以确定红外图像中每个恒温器对应的位置;根据红外图像中每个恒温器对应的位置,以及第一坐标、以及预先存储的定位标签与每个恒温器之间的位置关系,确定每个恒温器对应的每个第二坐标;根据第一坐标和每个第二坐标,计算待测主体当前的姿态。为煤矿井下的定位和检测提供了丰富的数据支撑,便于及时发现问题。于及时发现问题。于及时发现问题。
技术研发人员:杨光 陈洋 王琎
受保护的技术使用者:广东师大维智信息科技有限公司
技术研发日:2022.12.01
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。