技术特征:
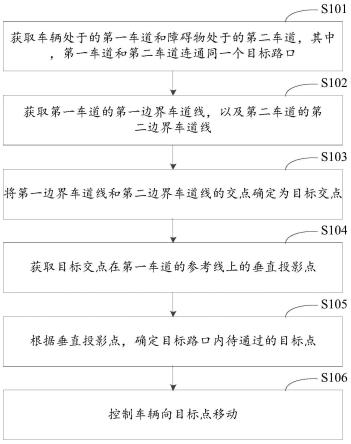
1.一种自动驾驶车辆的路口控制方法,包括:获取车辆处于的第一车道和障碍物处于的第二车道,其中,所述第一车道和所述第二车道连通同一个目标路口;获取所述第一车道的第一边界车道线,以及所述第二车道的第二边界车道线;将所述第一边界车道线和所述第二边界车道线的交点确定为目标交点;获取所述目标交点在所述第一车道的参考线上的垂直投影点;根据所述垂直投影点,确定所述目标路口内待通过的目标点;控制所述车辆向所述目标点移动。2.根据权利要求1所述的方法,其中,所述根据所述垂直投影点,确定所述目标路口内待通过的目标点,包括:响应于满足设定纠偏条件,对所述垂直投影点进行纠偏,得到所述目标点;或者,响应于未满足所述设定纠偏条件,将所述垂直投影点确定为所述目标点;其中,所述设定纠偏条件,包括:所述车辆移动至所述垂直投影点时,所述车辆与所述第二车道之间的参考距离小于或者等于设定阈值。3.根据权利要求2所述的方法,其中,所述对所述垂直投影点进行纠偏,得到所述目标点,包括:获取所述车辆移动至所述垂直投影点时,所述车辆与所述第二车道之间的参考距离;根据所述参考距离,对所述垂直投影点进行纠偏,得到所述目标点。4.根据权利要求3所述的方法,其中,所述根据所述参考距离,对所述垂直投影点进行纠偏,得到所述目标点,包括:根据所述参考距离,确定所述垂直投影点的平移距离;按照所述平移距离,对所述垂直投影点进行平移,得到所述目标点。5.根据权利要求4所述的方法,其中,所述根据所述参考距离,确定所述垂直投影点的平移距离,包括:根据所述第一车道的参考线和所述第二边界车道线,得到所述参考距离的转换角度;按照所述转换角度,对所述参考距离进行转换,得到所述平移距离。6.根据权利要求4所述的方法,其中,所述按照所述平移距离,对所述垂直投影点进行平移,得到所述目标点,包括:根据所述第一车道的参考线的垂直方向,确定所述垂直投影点的平移方向;按照所述平移距离和所述平移方向,对所述垂直投影点进行平移,得到所述目标点。7.根据权利要求2-6中任一项所述的方法,其中,所述参考距离包括所述车辆上的参考点与所述第二边界车道线之间的距离。8.根据权利要求1-6中任一项所述的方法,其中,所述控制所述车辆向所述目标点移动,包括:在当前帧为第i帧的情况下,根据所述车辆在第i帧时的速度和所述目标点,得到所述车辆在第i帧时的位置点,其中,i为正整数;控制所述车辆移动至所述第i帧时的位置点。9.根据权利要求1-6中任一项所述的方法,其中,所述控制所述车辆向所述目标点移动的过程中,还包括:
响应于满足设定释放目标点的条件,将所述目标点从所述车辆的行驶路线中删除,以更新所述行驶路线;控制所述车辆按照更新后的行驶路线继续行驶。10.根据权利要求9所述的方法,其中,更新所述行驶路线,还包括:根据所述车辆在第j帧时的速度和所述目标点,得到所述车辆在第j帧时的位置点,其中,j为正整数;根据所述第j帧时的位置点更新所述行驶路线。11.一种自动驾驶车辆的路口控制装置,包括:第一获取模块,用于获取车辆处于的第一车道和障碍物处于的第二车道,其中,所述第一车道和所述第二车道连通同一个目标路口;第二获取模块,用于获取所述第一车道的第一边界车道线,以及所述第二车道的第二边界车道线;第一确定模块,用于将所述第一边界车道线和所述第二边界车道线的交点确定为目标交点;第三获取模块,用于获取所述目标交点在所述第一车道的参考线上的垂直投影点;第二确定模块,用于根据所述垂直投影点,确定所述目标路口内待通过的目标点;控制模块,用于控制所述车辆向所述目标点移动。12.根据权利要求11所述的装置,其中,所述第二确定模块,还用于:响应于满足设定纠偏条件,对所述垂直投影点进行纠偏,得到所述目标点;或者,响应于未满足所述设定纠偏条件,将所述垂直投影点确定为所述目标点;其中,所述设定纠偏条件,包括:所述车辆移动至所述垂直投影点时,所述车辆与所述第二车道之间的参考距离小于或者等于设定阈值。13.根据权利要求12所述的装置,其中,所述第二确定模块,还用于:获取所述车辆移动至所述垂直投影点时,所述车辆与所述第二车道之间的参考距离;根据所述参考距离,对所述垂直投影点进行纠偏,得到所述目标点。14.根据权利要求13所述的装置,其中,所述第二确定模块,还用于:根据所述参考距离,确定所述垂直投影点的平移距离;按照所述平移距离,对所述垂直投影点进行平移,得到所述目标点。15.根据权利要求14所述的装置,其中,所述第二确定模块,还用于:根据所述第一车道的参考线和所述第二边界车道线,得到所述参考距离的转换角度;按照所述转换角度,对所述参考距离进行转换,得到所述平移距离。16.根据权利要求14所述的装置,其中,所述第二确定模块,还用于:根据所述第一车道的参考线的垂直方向,确定所述垂直投影点的平移方向;按照所述平移距离和所述平移方向,对所述垂直投影点进行平移,得到所述目标点。17.根据权利要求12-16中任一项所述的装置,其中,所述参考距离包括所述车辆上的参考点与所述第二边界车道线之间的距离。18.根据权利要求11-16中任一项所述的装置,其中,所述控制模块,还用于:在当前帧为第i帧的情况下,根据所述车辆在第i帧时的速度和所述目标点,得到所述车辆在第i帧时的位置点,其中,i为正整数;
控制所述车辆移动至所述第i帧时的位置点。19.根据权利要求11-16中任一项所述的装置,其中,所述控制所述车辆向所述目标点移动的过程中,所述控制模块,还用于:响应于满足设定释放目标点的条件,将所述目标点从所述车辆的行驶路线中删除,以更新所述行驶路线;控制所述车辆按照更新后的行驶路线继续行驶。20.根据权利要求19所述的装置,其中,所述控制模块,还用于:根据所述车辆在第j帧时的速度和所述目标点,得到所述车辆在第j帧时的位置点,其中,j为正整数;根据所述第j帧时的位置点更新所述行驶路线。21.一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如权利要求1-10中任一项所述的自动驾驶车辆的路口控制方法。22.一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行如权利要求1-10中任一项所述的自动驾驶车辆的路口控制方法。23.一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现如权利要求1-10中任一项所述的自动驾驶车辆的路口控制方法的步骤。
技术总结
本公开提供了一种自动驾驶车辆的路口控制方法、装置、电子设备和存储介质,涉及人工智能技术领域,尤其涉及自动驾驶、智能交通技术领域。具体实现方案为:获取车辆处于的第一车道和障碍物处于的第二车道,其中,第一车道和第二车道连通同一个目标路口;获取第一车道的第一边界车道线,以及第二车道的第二边界车道线;将第一边界车道线和第二边界车道线的交点确定为目标交点;获取目标交点在第一车道的参考线上的垂直投影点;根据垂直投影点,确定目标路口内待通过的目标点;控制车辆向目标点移动。由此,本方案中的自动驾驶车辆可继续向路口内的目标点移动,缩短了自动驾驶车辆在路口内的等待时长,提高了自动驾驶车辆在路口内的通行能力。通行能力。通行能力。
技术研发人员:杨烁煌 张宽
受保护的技术使用者:北京百度网讯科技有限公司
技术研发日:2022.11.09
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。