技术特征:
1.一种机场飞行区道面异物协同检测装置,其特征在于,包括:视频图像检测模块:包括多台高速相机,所有高速相机的拍摄区域依次衔接;所述视频图像检测模块用于拍摄飞行区道面,以得到第一图像;结构光检测模块:包括多台结构光相机,所有结构光相机的拍摄区域依次衔接;所述结构光检测模块用于拍摄飞行区道面,以得到第二图像;激光扫描云图像检测模块:用于拍摄飞行区道面,以得到点云数据;中心计算机:与所述视频图像检测模块、所述结构光检测模块和所述激光扫描云图像检测模块连接;所述中心计算机用于当根据所述第二图像或所述点云数据识别得到疑似异物时,计算所述第一图像中所述疑似异物所在区域,识别所述区域的类别,以得到道面异物。2.根据权利要求1所述机场飞行区道面异物协同检测装置,其特征在于,所述视频图像检测模块的检测区域覆盖所述结构光检测模块的检测区域和所述激光扫描云图像检测模块的检测区域。3.根据权利要求1所述机场飞行区道面异物协同检测装置,其特征在于,所述视频图像检测模块还包括多个光谱为白光的补光光源;所述结构光相机包括线性结构光源和高速线阵相机,所述线性结构光源的光谱为红光或绿光;所述激光扫描云图像检测模块中光源的光谱为红外光。4.根据权利要求3所述机场飞行区道面异物协同检测装置,其特征在于,所述中心计算机具体用于:配置所述补光光源和所述线性结构光源的工作形式为闪光;配置所述视频图像检测模块和所述结构光检测模块交替工作;配置所述补光光源和所述线性结构光源的发光时间和熄灭时间。5.根据权利要求1所述机场飞行区道面异物协同检测装置,其特征在于,所述中心计算机具体用于:采集校正图像;将接收到的所述第二图像除以所述校正图像,以得到识别图像;计算所述识别图像的平均亮度值;分别计算所述识别图像中每个像素与所述平均亮度值的差值,标记所述差值大于第一检测阈值的像素为异常像素;合并所有所述异常像素,以得到疑似目标;定义长度大于第二检测阈值的所述疑似目标为所述疑似异物。6.根据权利要求5所述机场飞行区道面异物协同检测装置,其特征在于,所述中心计算机具体用于:在所述点云数据的扫描线上移动滑窗,直至读取完所述点云数据的整个扫描线;每次移动滑窗后,读取所述滑窗内的连续数据,将所述连续数据与直线回归模型进行比对,定义所述连续数据中与所述直线回归模型的距离超过第三检测阈值的数据为所述疑似异物;合并重复和相连的所述疑似异物;和/或,计算所述点云数据中相邻数据的距离,定义该距离超过所述第三检测阈值的数
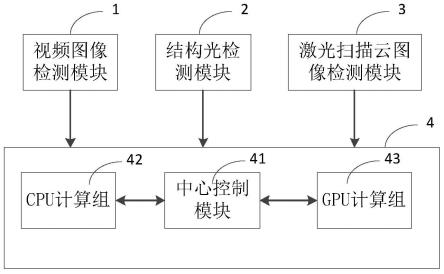
据为所述疑似异物。7.根据权利要求6所述机场飞行区道面异物协同检测装置,其特征在于,所述中心计算机具体用于:存储所述高速相机最新得到的一帧所述第一图像;识别最新的所述第一图像中所述疑似异物所在的所述区域;当所述区域的类别不属于道面固有结构时,定义所述疑似异物为所述道面异物。8.根据权利要求7所述机场飞行区道面异物协同检测装置,其特征在于,所述中心计算机还用于:配置所述飞行区道面中各个区域的类别,为每个类别配置一个包含分类识别参数的道面固有结构列表;当得到所述第一图像中所述疑似异物所在区域时,读取所述区域对应的道面固有结构列表;当所述疑似异物与所述道面固有结构列表的分类识别参数不相符时,判断所述区域的类别不属于道面固有结构。9.根据权利要求7所述机场飞行区道面异物协同检测装置,其特征在于,所述中心计算机具体用于:校正视频图像检测、结构光检测、激光扫描云图像检测的延迟时间;校正所述第一图像、所述第二图像、所述点云数据和所述装置的坐标系;读取所述第二图像或所述点云数据中所述疑似异物的坐标;根据下式将所述坐标转换为所述疑似异物在所述第一图像中的坐标:p’=p v(t1-t2);其中,p为所述第二图像或所述点云数据中所述疑似异物的坐标,p’为所述疑似异物在所述第一图像中的坐标,v为异物清理平台的运动速度矢量,t1为视频图像检测的延迟时间,t2为结构光检测或激光扫描云图像检测的延迟时间。10.根据权利要求9所述机场飞行区道面异物协同检测装置,其特征在于,所述中心计算机包括中心控制模块、cpu计算组、gpu计算组;所述cpu计算组用于所述完成结构光检测或激光扫描云图像检测;所述gpu计算组用于所述视频图像检测。
技术总结
本发明提供了一种机场飞行区道面异物协同检测装置,视频图像检测模块包括多台高速相机,所有高速相机的拍摄区域依次衔接,用于拍摄飞行区道面,以得到第一图像;结构光检测模块包括多台结构光相机,所有结构光相机的拍摄区域依次衔接,用于拍摄飞行区道面,以得到第二图像;激光扫描云图像检测模块用于拍摄飞行区道面,以得到点云数据;中心计算机:与视频图像检测模块、结构光检测模块和激光扫描云图像检测模块连接;中心计算机用于当根据第二图像或点云数据识别得到疑似异物时,计算第一图像中疑似异物所在区域,识别区域的类别,以得到道面异物。该装置成本低,能够完成机坪区域复杂环境的检测。杂环境的检测。杂环境的检测。
技术研发人员:隋运峰 黄忠涛 舒远军 邓凌竹 董子琪
受保护的技术使用者:中国民用航空总局第二研究所
技术研发日:2022.09.30
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。