技术特征:
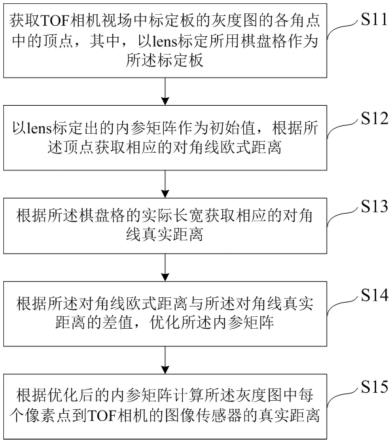
1.一种tof相机标定板的真实距离获取方法,其特征在于,包括如下步骤:获取tof相机视场中标定板的灰度图的各角点中的顶点,其中,以lens标定所用棋盘格作为所述标定板;以lens标定出的内参矩阵作为初始值,根据所述顶点获取相应的对角线欧式距离;根据所述棋盘格的实际长宽获取相应的对角线真实距离;根据所述对角线欧式距离与所述对角线真实距离的差值,优化所述内参矩阵;以及根据优化后的内参矩阵计算所述灰度图中每个像素点到tof相机的图像传感器的真实距离。2.根据权利要求1所述的方法,其特征在于,所述的获取tof相机视场中标定板的灰度图的各角点中的顶点的步骤进一步包括:根据tof相机的图像传感器输出的tof相机视场中标定板的灰度图的原始数据,计算所述灰度图中每个像素点的亮度值;根据所述亮度值获取所述灰度图的各角点;以及根据各角点的坐标,选出各角点中的顶点。3.根据权利要求2所述的方法,其特征在于,采用以下公式计算所述灰度图中每个像素点的亮度值amplitude:amplitude=abs(i) abs(q),其中,i=a0-b0-(a180-b180),q=a90-b90-(a270-b270),a,b为图像传感器输出为0、90、180、270相位对应的原始数据。4.根据权利要求2所述的方法,其特征在于,所述的根据所述亮度值获取所述灰度图的各角点的步骤进一步包括:根据所述亮度值,采用opencv角点检测方式获取所述灰度图的各角点。5.根据权利要求1所述的方法,其特征在于,所述的根据所述对角线欧式距离与所述对角线真实距离的差值,迭代优化所述内参矩阵的步骤进一步包括:以lens标定出的内参矩阵作为初始值,通过迭代查找计算出使得所述对角线欧式距离与所述对角线真实距离的差值小于或等于预设差值范围的目标值,从而优化所述内参矩阵。6.根据权利要求1所述的方法,其特征在于,所述的根据所述顶点获取相应的对角线欧式距离的步骤进一步包括:采用以下像素坐标与世界坐标的转换关系,计算出各顶点的世界坐标:其中,z
c
代表缩放系数,u、v为像素坐标系中一像素点的坐标值,m1对应的矩阵为内参矩阵,u0和v0为内参矩阵的中心点,f
x
和f
y
为内参矩阵的焦距,m2对应的矩阵为外参矩阵,r是像素坐标系的坐标轴在世界坐标系的坐标轴中的方向矢量,t是从世界坐标系的原点到像素坐标系的原点的平移矢量,x
w
、y
w
、z
w
为世界坐标系中对应点的坐标值;以及
根据各顶点的世界坐标,采用以下公式计算相应的对角线欧式距离d1、d2:d1=sqrt((x
w11-x
wmn
)2 (y
w11-y
wmn
)2 (z
w11-z
wmn
)2),d2=sqrt((x
w1n-x
wm1
)2 (y
w1n-y
wm1
)2 (z
w1n-z
wm1
)2)。7.根据权利要求6所述的方法,其特征在于,所述的根据所述棋盘格的实际长宽获取相应的对角线真实距离的步骤进一步包括:根据勾股定理求得相应的对角线真实距离drel1、drel2:drel1=drel2=sqrt(x2 y2);其中,x为棋盘格的实际长度,y为棋盘格的实际宽度。8.根据权利要求7所述的方法,其特征在于,所述的根据所述对角线欧式距离与所述对角线真实距离的差值,迭代优化所述内参矩阵的步骤进一步包括:判断以下关系式是否成立:argmin(abs(drel1-d1) abs(drel2-d2))&&abs(f
x-f
y
)<thr,其中,drel1、drel2为对角线真实距离,d1、d2为对角线欧式距离,thr为预定焦距差异的最大阈值;若关系式成立,则获取当前的内参矩阵作为优化后的内参矩阵;若关系式不成立,则改变f
x
和/或f
y
的值,迭代查找满足关系式成立的内参矩阵作为优化后的内参矩阵。9.一种tof相机标定板的真实距离获取装置,其特征在于,包括:顶点获取模块,用于获取tof相机视场中标定板的灰度图的各角点中的顶点,其中,以lens标定所用棋盘格作为所述标定板;对角线欧式距离获取模块,用于以lens标定出的内参矩阵作为初始值,根据所述顶点获取相应的对角线欧式距离;对角线真实距离获取模块,用于根据所述棋盘格的实际长宽获取相应的对角线真实距离;优化模块,用于根据所述对角线欧式距离与所述对角线真实距离的差值,迭代优化所述内参矩阵;以及真实距离获取模块,用于根据优化后的内参矩阵计算所述灰度图中每个像素点到tof相机的图像传感器的真实距离。10.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机可执行程序,其特征在于,所述处理器执行所述计算机可执行程序时实现如权利要求1~8任一项所述的tof相机标定板的真实距离获取方法的步骤。
技术总结
本发明公开了一种ToF相机标定板的真实距离获取方法及装置、电子设备。所述方法包括:获取TOF相机视场中标定板的灰度图的各角点中的顶点,其中,以lens标定所用棋盘格作为所述标定板;以lens标定出的内参矩阵作为初始值,根据所述顶点获取相应的对角线欧式距离;根据所述棋盘格的实际长宽获取相应的对角线真实距离;根据所述对角线欧式距离与所述对角线真实距离的差值,优化所述内参矩阵;以及根据优化后的内参矩阵计算所述灰度图中每个像素点到TOF相机的图像传感器的真实距离。本发明利用lens标定所用棋盘格作为FPPN标定板,节省了标定时间和成本;基于棋盘格对角线真实距离校正对角线欧式距离,对内参矩阵进行优化,提高了计算真实距离的准确性。计算真实距离的准确性。计算真实距离的准确性。
技术研发人员:胡涛 胡波 杨宁昕
受保护的技术使用者:福建杰木科技有限公司
技术研发日:2022.10.20
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。