技术特征:
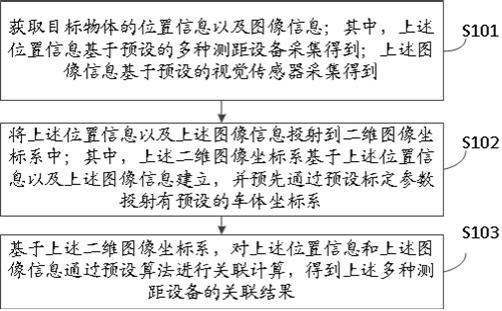
1.一种多传感器关联方法,其特征在于,包括:获取目标物体的位置信息以及图像信息;其中,所述位置信息基于预设的多种测距设备采集得到;所述图像信息基于预设的视觉传感器采集得到;将所述位置信息投射到二维图像坐标系中;其中,所述二维图像坐标系基于所述位置信息以及所述图像信息建立;基于所述二维图像坐标系,对所述位置信息和所述图像信息通过预设算法进行关联计算,得到所述多种测距设备的关联结果。2.根据权利要求1所述的多传感器关联方法,其特征在于,基于所述二维图像坐标系对所述位置信息和所述图像信息通过预设算法进行关联计算,得到多传感器关联结果的步骤,包括:基于所述二维图像坐标系,判断所述位置信息是否在所述图像信息的目标像素框内;如果是,确定所述位置信息与所述图像信息的所述目标像素框相关联;如果否,计算所述位置信息与所述目标像素框之间的相似程度;如果所述相似程度达到预设相似度阈值,确定所述位置信息与所述图像信息的所述目标像素框相关联。3.根据权利要求2所述的多传感器关联方法,其特征在于,计算所述位置信息与所述目标像素框之间的相似程度的步骤,包括:计算所述位置信息携带的目标点在所述二维图像坐标系下与所述目标像素框之间的离散程度;根据离散程度,确定所述位置信息与所述目标像素框之间的相似程度。4.根据权利要求3所述的多传感器关联方法,其特征在于,计算所述位置信息携带的目标点在所述二维图像坐标系下与所述目标像素框之间的离散程度的步骤,包括:基于预设的二维相似度得分计算公式计算所述目标点与所述目标像素框中心点的距离相似度得分;根据所述距离相似度得分,确定所述位置信息与所述目标像素框之间的离散程度。5.根据权利要求4所述的多传感器关联方法,其特征在于,基于预设的二维相似度得分计算公式计算所述目标点与所述目标像素框中心点的距离相似度得分的步骤之后,所述方法还包括:根据所述图像信息,判断所述目标物体是否存在横向变道行为;如果是,根据第一预设参数调整所述二维相似度得分计算公式中正态分布模型的标准差,得到更新后的二维相似度得分计算公式;基于预设的二维相似度得分计算公式计算所述目标点与所述目标像素框中心点的二维距离相似度得分的步骤,包括:基于所述更新后的二维相似度得分计算公式计算所述目标点与所述目标像素框中心点的二维距离相似度得分。6.根据权利要求3所述的多传感器关联方法,其特征在于,计算所述位置信息与所述目标像素框之间的相似程度的步骤之前,所述方法还包括:基于第二预设参数,计算所述目标点对应的目标尺寸;计算所述位置信息与所述目标像素框之间的相似程度的步骤,还包括:
计算所述位置信息对应的所述目标尺寸与所述目标像素框之间的交并比,得到交并比计算结果;根据所述交并比计算结果,确定所述位置信息与所述目标像素框之间的相似程度。7.根据权利要求6所述的多传感器关联方法,其特征在于,计算所述位置信息与所述目标像素框之间的相似程度的步骤,还包括:基于预设的速度相似函数,计算所述位置信息与所述目标像素框对应的所述视觉传感器感知到的所述目标物体的速度差;根据所述速度差,计算所述位置信息与所述目标像素框之间的相似程度。8.根据权利要求7所述的多传感器关联方法,其特征在于,获取目标物体的位置信息以及图像信息的步骤之后,所述方法包括:根据所述位置信息,确定所述目标物体与所述测距设备的最小距离为自车距离;基于所述二维图像坐标系对所述位置信息和所述图像信息通过预设算法进行关联计算,得到所述多种测距设备的关联结果的步骤,包括:基于所述二维图像坐标系,按照由近到远的方式逐个匹配与所述自车距离为预设距离阈值内的多个目标点;将距离所述测距设备最近的目标点与所述目标像素框相关联,得到所述多种测距设备和所述视觉传感器的关联结果。9.根据权利要求1所述的多传感器关联方法,其特征在于,所述测距设备包括:激光雷达以及毫米波雷达。10.一种多传感器关联装置,其特征在于,包括:传感器数据获取模块,用于获取目标物体的位置信息以及图像信息;其中,所述位置信息基于预设的多种测距设备采集得到;所述图像信息基于预设的视觉传感器采集得到;视锥构建模块,用于将所述位置信息投射到二维图像坐标系中;其中,所述二维图像坐标系基于所述位置信息以及所述图像信息建立;传感器关联模块,用于基于所述二维图像坐标系,对所述位置信息和所述图像信息通过预设算法进行关联计算,得到所述多种测距设备的关联结果。
技术总结
本发明提供一种的多传感器关联方法及装置,涉及机器视觉技术领域,该方法包括:获取目标物体的位置信息以及图像信息;其中,上述位置信息基于预设的多种测距设备采集得到;上述图像信息基于预设的视觉传感器采集得到;将上述位置信息投射到二维图像坐标系中;其中,上述二维图像坐标系基于上述位置信息以及上述图像信息建立;基于上述二维图像坐标系,对上述位置信息和上述图像信息通过预设算法进行关联计算,得到上述多种测距设备的关联结果。该方法通过二维坐标系将多传感器的采集信号进行关联,提升传感器关联后得到结果的准确率。率。率。
技术研发人员:王梓臣 韩志华 史院平 王潍 段小河 杨福威 张旭
受保护的技术使用者:苏州挚途科技有限公司
技术研发日:2022.11.30
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。