技术特征:
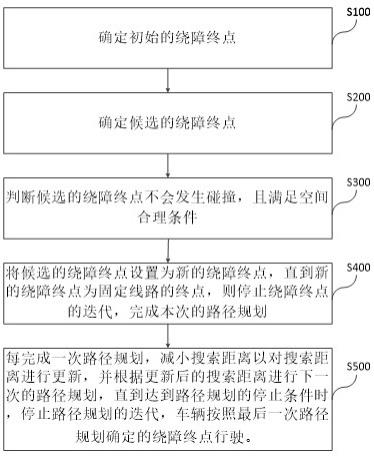
1.一种固定线路自动驾驶的绕障终点选择方法,其特征在于,包括:获取固定线路、所述固定线路上的第一个障碍物和所述固定线路的终点;将所述固定线路中沿所述第一个障碍物前进方向的预设距离处的位置点确定为初始的绕障终点;根据搜索距离进行路径规划的迭代,每一次的路径规划包括:从所述初始的绕障终点开始,进行绕障终点的迭代,所述绕障终点的迭代包括:获取本次的路径规划的搜索距离;将所述固定线路中沿当前的绕障终点前进方向的搜索距离处的位置点确定为候选的绕障终点;判断车辆位于所述候选的绕障终点时是否会发生碰撞;若确定车辆位于所述候选的绕障终点时不会发生碰撞,则获取所述固定线路中沿所述候选的绕障终点前进方向最近的一个障碍物,并获取该障碍物与所述候选的绕障终点之间的距离;若所述距离大于设定阈值,则将所述候选的绕障终点设置为新的绕障终点,并继续进行所述绕障终点的迭代,直到所述新的绕障终点为所述固定线路的终点,则停止所述绕障终点的迭代,完成本次的路径规划;每完成一次路径规划,减小搜索距离以对所述搜索距离进行更新,并根据更新后的搜索距离进行下一次的路径规划,直到达到路径规划的停止条件时,停止所述路径规划的迭代,车辆按照最后一次路径规划确定的绕障终点行驶。2.如权利要求1所述的固定线路自动驾驶的绕障终点选择方法,其特征在于,所述每完成一次路径规划,减小搜索距离以对所述搜索距离进行更新,并根据更新后的搜索距离进行下一次的路径规划,直到达到路径规划的停止条件时,停止所述路径规划的迭代,包括:获取路径规划的迭代次数和路径规划的迭代时间,当所述路径规划的迭代时间超过设定时间,或者所述路径规划的迭代次数超过设定次数时,停止所述路径规划的迭代。3.如权利要求1所述的固定线路自动驾驶的绕障终点选择方法,其特征在于,所述方法还包括,在每一次确定候选的绕障终点时,均获取更新的行驶边界环境和障碍物信息。4.如权利要求1所述的固定线路自动驾驶的绕障终点选择方法,其特征在于,所述减小搜索距离以对所述搜索距离进行更新,包括:减小搜索距离的一半以对所述搜索距离进行更新。5.一种固定线路自动驾驶的绕障终点选择系统,其特征在于,包括;路径运算单元,包括绕障终点筛选模块和路径规划模块;绕障终点筛选模块获取固定线路、所述固定线路上的第一个障碍物和所述固定线路的终点,并将所述固定线路中沿所述第一个障碍物前进方向的预设距离处的位置点确定为初始的绕障终点;绕障终点筛选模块根据搜索距离进行路径规划的迭代,每一次的路径规划包括:从所述初始的绕障终点开始,进行绕障终点的迭代,所述绕障终点的迭代包括:获取本次的路径规划的搜索距离;将所述固定线路中沿当前的绕障终点前进方向的搜索距离处的位置点确定为候选的
绕障终点;判断车辆位于所述候选的绕障终点时是否会发生碰撞;若确定车辆位于所述候选的绕障终点时不会发生碰撞,则获取所述固定线路中沿所述候选的绕障终点前进方向最近的一个障碍物,并获取该障碍物与所述候选的绕障终点之间的距离;若所述距离大于设定阈值,则将所述候选的绕障终点设置为新的绕障终点,并继续进行所述绕障终点的迭代,直到所述新的绕障终点为所述固定线路的终点,则停止所述绕障终点的迭代,完成本次的路径规划;每完成一次路径规划,减小搜索距离以对所述搜索距离进行更新,并根据更新后的搜索距离进行下一次的路径规划,直到达到路径规划的停止条件时,停止所述路径规划的迭代;路径规划模块获取最后一次路径规划确定的绕障终点,以完成路径规划。6.根据权利要求5所述的固定线路自动驾驶的绕障终点选择系统,其特征在于,所述每完成一次路径规划,减小搜索距离以对所述搜索距离进行更新,并根据更新后的搜索距离进行下一次的路径规划,直到达到路径规划的停止条件时,停止所述路径规划的迭代,包括:绕障终点筛选模块获取路径规划的迭代次数和路径规划的迭代时间,当所述路径规划的迭代时间超过设定时间,或者所述路径规划的迭代次数超过设定次数时,停止所述路径规划的迭代。7.根据权利要求5所述的固定线路自动驾驶的绕障终点选择系统,其特征在于,还包括车辆控制单元,所述车辆控制单元获取路径规划模块发送的最后一次路径规划确定的绕障终点进行路径跟随,并控制车辆完成绕障。8.根据权利要求5所述的固定线路自动驾驶的绕障终点选择系统,其特征在于,还包括全局环境及障碍物信息感知单元,用于获取行驶边界环境和障碍物信息,在每一次确定候选的绕障终点时,均获取更新的行驶边界环境和障碍物信息。9.根据权利要求5所述的固定线路自动驾驶的绕障终点选择系统,其特征在于,所述减小搜索距离以对所述搜索距离进行更新,包括:减小搜索距离的一半以对所述搜索距离进行更新。10.一种计算机可读存储介质,其特征在于,所述介质上存储有程序,所述程序能够被处理器执行以实现如权利要求1-4中任一项所述的方法。
技术总结
一种固定线路车辆绕障终点选择方法及系统,涉及固定线路绕障领域。将固定线路中预设距离处的位置点确定为初始绕障终点;从初始绕障终点开始进行绕障终点的迭代;将固定线路中沿绕障终点前进方向的搜索距离处的位置点确定为候选绕障终点;获取距离候选绕障终点最近的障碍物,并获取该障碍物与候选绕障终点之间的距离;若距离大于设定阈值,则将候选绕障终点设置为新的绕障终点并继续进行绕障终点的迭代,直到新的绕障终点为固定线路的终点,则停止绕障终点的迭代以完成路径规划;每完成一次路径规划,减小搜索距离以对搜索距离进行更新并根据更新后的搜索距离进行下一次的路径规划,直到达到路径规划的停止条件时,停止路径规划的迭代。径规划的迭代。径规划的迭代。
技术研发人员:黎佳骏 朱成军 王博 宋士佳 孙超 王文伟
受保护的技术使用者:北京理工大学深圳汽车研究院(电动车辆国家工程实验室深圳研究院)
技术研发日:2022.11.28
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。