技术特征:
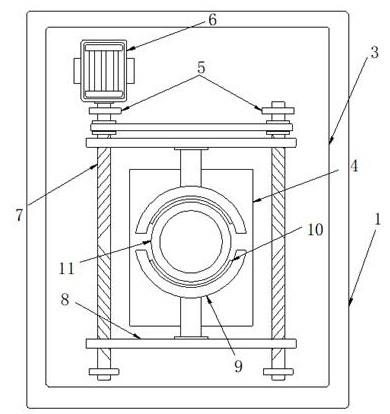
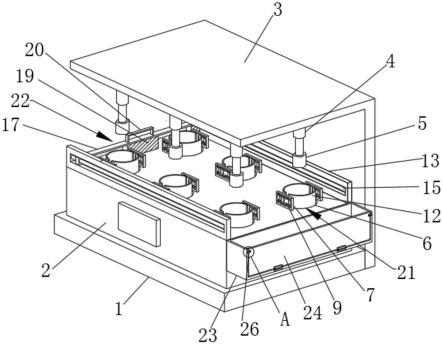
1.一种具有定位功能的机器人手臂爪力检测装置,包括底座(1)、液压推杆(2)、支撑板(3)、空槽(4)和固定块(5),其特征在于:所述底座(1)的上端安装有液压推杆(2),且液压推杆(2)的上端安装有支撑板(3),并且支撑板(3)的内部开设有空槽(4),所述支撑板(3)的上端安装有固定块(5)和第一电机(6),且第一电机(6)的前端安装有螺杆(7),并且固定块(5)的内部转动安装有螺杆(7),所述螺杆(7)的外侧套设有移动板(8),且移动板(8)的一侧安装有固定件(9),并且固定件(9)向内凹陷的一侧安装有弹性条(10),同时弹性条(10)向内凹陷的一侧设置有预设臂爪(11);所述底座(1)的上端通过连接杆安装有固定板(12),且固定板(12)的上端开设有滑槽(13),并且滑槽(13)的内部安装有运动板(14),同时固定板(12)的上端通过转轴安装有第二齿轮(23),所述运动板(14)的一侧安装有安装板(16),且安装板(16)的一侧内部安装有压力传感器(17),并且安装板(16)的一侧安装有滑杆(18),所述运动板(14)的内部开设有运动槽(15),且运动板(14)的一侧安装有齿条(19),所述底座(1)的上端安装有第二电机(20),且第二电机(20)通过输出轴(21)安装有第一齿轮(22)。2.根据权利要求1所述的一种具有定位功能的机器人手臂爪力检测装置,其特征在于:所述螺杆(7)与移动板(8)螺纹连接,且螺杆(7)关于移动板(8)的竖向中轴线对称设置有两组,并且移动板(8)关于螺杆(7)横向中轴线对称设置有两组,同时螺杆(7)为双向螺纹结构。3.根据权利要求1所述的一种具有定位功能的机器人手臂爪力检测装置,其特征在于:所述固定件(9)的一端俯视呈弧状结构,且弹性条(10)与固定件(9)的内凹侧粘接连接,并且固定件(9)关于螺杆(7)横向中轴线对称设置有两组。4.根据权利要求1所述的一种具有定位功能的机器人手臂爪力检测装置,其特征在于:所述运动板(14)通过滑槽(13)与固定板(12)构成滑动结构,且运动板(14)和滑槽(13)关于输出轴(21)的中心对称设置有两组。5.根据权利要求1所述的一种具有定位功能的机器人手臂爪力检测装置,其特征在于:所述滑杆(18)通过运动槽(15)与运动板(14)构成滑动结构,且滑杆(18)和运动槽(15)关于第一齿轮(22)的竖向中轴线对称设置有两组。6.根据权利要求1所述的一种具有定位功能的机器人手臂爪力检测装置,其特征在于:所述第一齿轮(22)与第二齿轮(23)啮合连接,且第二齿轮(23)关于第一齿轮(22)的竖向中轴线对称设置有两组,并且第二齿轮(23)与齿条(19)啮合连接。
技术总结
本实用新型公开了一种具有定位功能的机器人手臂爪力检测装置,包括底座、液压推杆、支撑板、空槽和固定块,所述底座的上端安装有液压推杆,且液压推杆的上端安装有支撑板,并且支撑板的内部开设有空槽,所述支撑板的上端安装有固定块和第一电机,且第一电机的前端安装有螺杆,并且固定块的内部转动安装有螺杆,所述螺杆的外侧套设有移动板,且移动板的一侧安装有固定件。该具有定位功能的机器人手臂爪力检测装置,第一电机会带动螺杆进行转动,螺杆则会通过皮带带动另一组螺杆进行转动,移动板在相互靠近的过程中会将预设臂爪固定在空槽的内部,至此便完成了该预设臂爪的定位过程,可以有效的提高该装置检测结果的准确性。可以有效的提高该装置检测结果的准确性。可以有效的提高该装置检测结果的准确性。
技术研发人员:陈新林 严立
受保护的技术使用者:南通泽志自动化科技有限公司
技术研发日:2022.07.29
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。