技术特征:
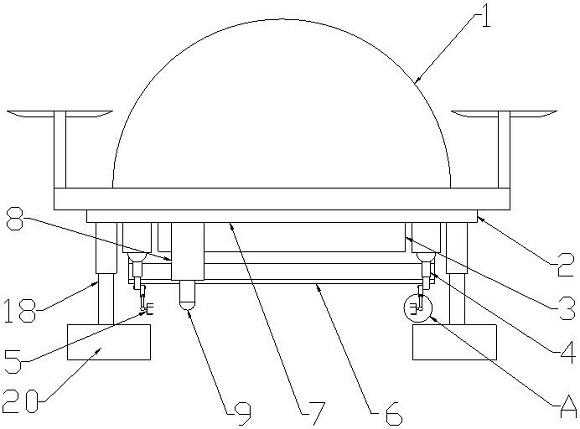
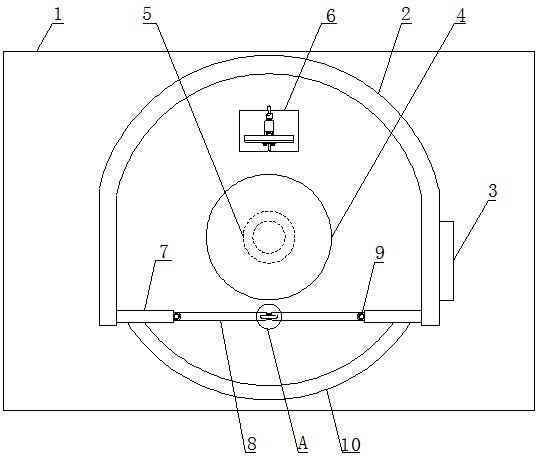
1.一种基于无人机辅助上线的带电安装接地挂环机器人,包括可拆卸式固定安装在无人机(1)底部外壳上的底板(2),其特征在于:所述底板(2)上固定设有电控装置(3)、用于为电控装置(3)供电的电池(36),底板(2)上固定设有两个机械支臂(4),所述机械支臂(4)的外端设有机械爪(5);所述底板(2)上固定设有两个左右相互对称的定位装置,底板(2)上固定设有用于卡接接地挂环的推环装置(6);所述底板(2)上开设有滑槽(7),所述滑槽(7)的内部滑动连接有第一伸缩杆(8),所述第一伸缩杆(8)的下端固定设有切线刀头(9)。2.根据权利要求1所述的基于无人机辅助上线的带电安装接地挂环机器人,其特征在于:所述机械爪(5)包括与所述机械支臂(4)下端转动连接的竖杆(10),所述竖杆(10)的下端转动连接有活动杆(11),所述活动杆(11)的另一端转动连接有掌盘(12),所述掌盘(12)的侧壁上转动连接有三个指杆,所述指杆均包括第一节(13)、第二节(14)和第三节(15),且所述第一节(13)的一端与掌盘(12)转动连接,第一节(13)的另一端与所述第二节(14)转动连接,第二节(14)的另一端与所述第三节(15)转动连接,所述第三节(15)的另一端固定设有半球凸起(16);所述第一节(13)、第二节(14)和第三节(15)的内侧壁上均固定设有防滑弧形凸起(17)。3.根据权利要求2所述的基于无人机辅助上线的带电安装接地挂环机器人,其特征在于:所述定位装置包括与所述底板(2)的下表面固定连接的第二伸缩杆(18),所述伸缩杆的下端固定连接有连接部(19),所述连接部(19)的前侧壁上转动连接有前弧形握板(20),连接部(19)的后侧壁上转动连接有后弧形握板(21),且所述前弧形握板(20)与后弧形握板(21)相对应设置。4.根据权利要求1所述的基于无人机辅助上线的带电安装接地挂环机器人,其特征在于:所述推环装置(6)包括固定连接在所述底板(2)下表面上的箱体(22),所述箱体(22)的侧壁上开设有朝向所述切线刀头(9)方向的槽口(23),所述槽口(23)的内底面上固定设有朝向槽口(23)开口方向延伸的第三伸缩杆(24),槽口(23)的内下表面上固定设有滑轨(25),所述滑轨(25)上滑动连接有所述接地挂环。5.根据权利要求4所述的基于无人机辅助上线的带电安装接地挂环机器人,其特征在于:所述接地挂环包括中间板(26),所述中间板(26)的一侧壁上固定连接有“u”形环柄(27),所述环柄(27)的边框下表面固定设有与所述滑轨(25)相对应的滑凸(28);所述中间板(26)的另一侧壁上固定连接有用于卡接电线的卡接装置。6.根据权利要求5所述的基于无人机辅助上线的带电安装接地挂环机器人,其特征在于:所述卡接装置包括与中间板(26)固定连接的卡接板(29),所述卡接板(29)的上端前侧壁固定连接有上挂臂(30),卡接板(29)的下端前侧壁固定连接有下挂臂(31),所述下挂壁的内侧壁上开设有弧形槽(32);所述上挂壁的外端转动连接有卡杆(33),所述卡杆(33)的下端固定设有弧形部(34),且所述弧形部(34)延伸至所述弧形槽(32)的内部。7.根据权利要求1所述的基于无人机辅助上线的带电安装接地挂环机器人,其特征在于:所述电控装置(3)网络连接有用于操控机械支臂(4)、定位装置、推环装置(6)和切线刀头(9)的遥控器,所述遥控器上设置有显示屏。8.根据权利要求1所述的基于无人机辅助上线的带电安装接地挂环机器人,其特征在于:所述底板(2)上开设有多个圆孔(35),底板(2)通过螺钉贯穿所述圆孔(35)与所述无人机(1)的底部外壳固定连接。
9.根据权利要求4所述的基于无人机辅助上线的带电安装接地挂环机器人,其特征在于:所述滑轨(25)为两个,且两个滑轨(25)相互平行设置,两个滑轨(25)均朝向所述槽口(23)的开口方向延伸。10.根据权利要求5所述的基于无人机辅助上线的带电安装接地挂环机器人,其特征在于:所述滑凸(28)为两个,其一个固定连接在所述环柄(27)的前边框下表面,其另一个固定连接在环柄(27)的后边框下表面。
技术总结
本发明公开了一种基于无人机辅助上线的带电安装接地挂环机器人,属于接地挂环安装技术领域,解决了接地挂环人工安装费时费力的技术问题。其包括可拆卸式固定安装在无人机底部外壳上的底板,底板上固定设有电控装置、用于为电控装置供电的电池,底板上固定设有两个机械支臂,机械支臂的外端设有机械爪。底板上固定设有两个左右相互对称的定位装置,底板上固定设有用于卡接接地挂环的推环装置。底板上开设有滑槽,滑槽的内部滑动连接有第一伸缩杆,第一伸缩杆的下端固定设有切线刀头。机械爪包括与机械支臂下端转动连接的竖杆,竖杆的下端转动连接有活动杆,活动杆的另一端转动连接有掌盘,掌盘的侧壁上转动连接有三个指杆。掌盘的侧壁上转动连接有三个指杆。掌盘的侧壁上转动连接有三个指杆。
技术研发人员:佘彦杰 卢淼 王晨晨 王朝乐 吕宝宝 马晓飞 焦珊珊 贠飞龙 刘云龙 刘燕东 黄磊峰 戚弘亮 王月萍
受保护的技术使用者:国网河南省电力公司洛阳供电公司
技术研发日:2022.11.10
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。