技术特征:
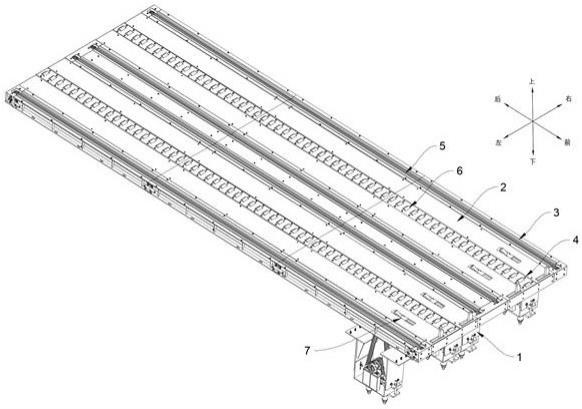
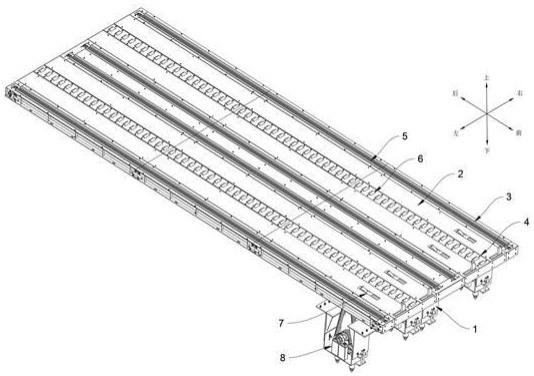
1.一种嵌入式集装箱自动装卸车系统的控制方法,其特征在于:基于嵌入式集装箱自动装车系统,所述嵌入式集装箱自动装车系统包括:运输载板,所述运输载板的上端开设有贯穿所述运输载板前端至后端的若干动力轨道和若干无动力轨道;若干动力输送机构,所述动力输送机构的传动件分别设置于所述动力轨道,用于对运输载板上的货物提供静摩擦力从而带动货物;若干无动力输送机构,所述无动力输送机构分别设置于所述无动力轨道,用于对运输载板上的货物提供动摩擦力从而减小所述动力输送机构的驱动力;若干顶升机构;所述无动力输送机构可上下活动设置于所述无动力轨道,所述顶升机构设置于所述无动力轨道和所述无动力输送机构之间,所述顶升机构用于带动所述无动力输送机构上下活动;所述控制方法包括装车控制方法和/或卸车控制方法,所述装车控制方法包括以下步骤:s101,将货物在所述运输载板的前端进行堆叠,在货物堆叠的过程中,检测货物的高度和/或重量;s102,当所述运输载板的前端货物的高度达到预设位置和/或重量达到预设重量,驱动所述顶升机构使所述无动力输送机构顶靠在货物下端面,驱动所述动力输送机构带动货物向后运行一段距离,使所述运输载板的前端腾空;s103,重复步骤s101-s102,直至货物装满;所述卸车控制方法包括以下步骤:s201,当所述运输载板的前端货物腾空时,驱动所述顶升机构使所述无动力输送机构顶靠在货物下端面,驱动所述动力输送机构带动货物向前运行,使货物位于所述运输载板的前端;s202,搬离所述运输载板前端的货物,搬离过程中检测货物的高度和/或重量;s203,重复步骤s201-202,直至货物全部卸载。2.根据权利要求1所述的一种嵌入式集装箱自动装卸车系统的控制方法,其特征在于:所述顶升机构包括气囊和充气装置;所述无动力轨道为下凹结构,所述无动力输送机构包括和所述无动力轨道相配合的活动槽,以及设置于所述活动槽上表面的滚筒传送带,所述活动槽嵌套设置于所述无动力轨道内;所述无动力轨道的底面和活动槽之间间距设置形成气囊腔,所述气囊腔铺设所述气囊,所述气囊连通连接至所述充气装置,所述充气装置对所述气囊充气从而带动所述无动力输送机构上下活动;所述驱动所述顶升机构使所述无动力输送机构顶靠在货物下端面,包括:通过所述充气装置对所述气囊充气,使气囊膨胀从而驱动所述无动力输送机构顶靠在货物下端面。3.根据权利要求2所述的一种嵌入式集装箱自动装卸车系统的控制方法,其特征在于:所述嵌入式集装箱自动装车系统包括气控电磁阀、重力传感器,所述气控电磁阀连接所述气囊,用于控制所述气囊内的气压,所述重力传感器设置于动力输送机构,所述气囊为扁圆结构;
所述驱动所述顶升机构使所述无动力输送机构顶靠在货物下端面,包括:通过所述重力传感器获取货物对所述动力输送机构的压紧力g,通过所述气控电磁阀调节所述气囊内的气压:所述气囊的上端面面积s*气囊内气压p=(0.5~0.6)压紧力g。4.根据权利要求1所述的一种嵌入式集装箱自动装卸车系统的控制方法,其特征在于:所述嵌入式集装箱自动装车系统包括若干物体检测传感器和/或若干重力传感器;所述当所述运输载板的前端货物的高度达到预设位置和/或重量达到预设重量,包括:通过所述物体检测传感器检测所述运输载板前端的设定位置是否有物体,若有则控制系统判定所述运输载板的前端堆满货物,通过所述重力传感器检测所述运输载板前端的物体的重力数据,若重力数据达到预定重力数据则控制系统判定所述运输载板的前端堆满货物。5.根据权利要求1所述的一种嵌入式集装箱自动装卸车系统的控制方法,其特征在于:所述嵌入式集装箱自动装车系统包括限位机构,设置于所述运输载板前端的下方,所述运输载板开设有与所述动力轨道或所述无动力轨道相平行的通孔,所述限位机构包括驱动单元和限位挡块,所述限位挡块可穿过所述通孔凸出于所述通孔的上方,所述驱动单元驱动所述限位挡块在所述通孔内前后移动,从而限定货物的位置。6.根据权利要求5所述的一种嵌入式集装箱自动装卸车系统的控制方法,其特征在于:步骤s103之后包括:s104,驱动限位机构向后端运行,使限位挡块抵靠在货物前端从而顶紧货物;步骤s201之前包括:s200,驱动限位机构向前端运行,使限位挡块远离货物前端从而释放货物。7.根据权利要求5所述的一种嵌入式集装箱自动装卸车系统的控制方法,其特征在于:所述限位机构包括压力传感器,所述压力传感器用于获取所述限位挡块的压力,所述驱动限位机构向后端运行,使限位挡块抵靠在货物前端从而顶紧货物,包括:驱动限位机构向后端运行,获取所述限位机构的压力传感器的数据,当所述限位机构的压力传感器的数据达到设定压力时,所述限位机构停止并保持。
技术总结
本发明涉及一种嵌入式集装箱自动装卸车系统的控制方法,所述控制方法包括装车控制方法和/或卸车控制方法,所述装车控制方法包括以下步骤S101,将货物在所述运输载板的前端进行堆叠,在货物堆叠的过程中,检测货物的高度和/或重量;S102,当所述运输载板的前端货物的高度达到预设位置和/或重量达到预设重量,驱动所述顶升机构使所述无动力输送机构顶靠在货物下端面,驱动所述动力输送机构带动货物向后运行一段距离,使所述运输载板的前端腾空;S103,重复步骤S101-S102,直至货物装满;所述卸车控制方法与装车控制方法相反。采用此积放式输送形式可保证人工取放货时,货物都在车厢口处,节省货物输送时间和洞库的人工地牛装卸车作业时间。车作业时间。车作业时间。
技术研发人员:杨小龙 卢灿 林贵霖 黄彬 邓高燕 何辉金 程生科 邓晓强 杜和钢
受保护的技术使用者:厦门龙合智能科技有限公司
技术研发日:2022.11.28
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。