技术特征:
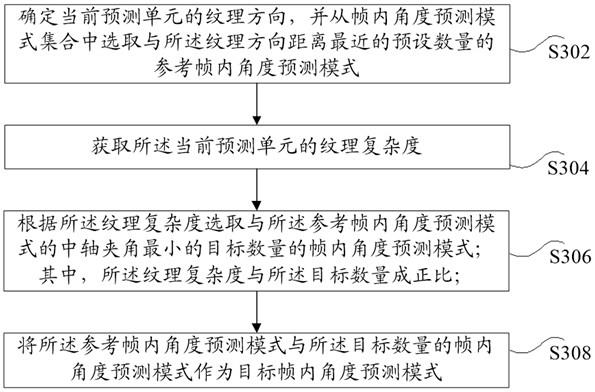
1.一种帧内预测模式的确定方法,其特征在于,包括:确定当前预测单元的纹理方向,并从帧内角度预测模式集合中选取与所述纹理方向距离最近的预设数量的参考帧内角度预测模式;获取所述当前预测单元的纹理复杂度;根据所述纹理复杂度选取与所述参考帧内角度预测模式的中轴夹角最小的目标数量的帧内角度预测模式;其中,所述纹理复杂度与所述目标数量成正比;将所述参考帧内角度预测模式与所述目标数量的帧内角度预测模式作为目标帧内角度预测模式。2.根据权利要求1所述的方法,其特征在于,所述从帧内角度预测模式集合中选取与所述纹理方向距离最近的预设数量的参考帧内角度预测模式,包括:依次计算所述帧内角度预测模式集合中每个帧内角度预测模式与所述纹理方向之间的距离;将与所述纹理方向距离最近的预设数量的参考帧内角度预测模式确定为参考帧内角度预测模式。3.根据权利要求1所述的方法,其特征在于,所述获取所述当前预测单元的纹理复杂度,包括:通过公式(1)获取所述纹理复杂度:(1)其中,m表示当前预测单元的长,n表示当前预测单元的宽,p
ij
表示当前预测单元中(i,j)位置处的像素值,cf
pu
表示所述当前预测单元的纹理复杂度。4.根据权利要求1所述的方法,其特征在于,所述根据所述纹理复杂度选取与所述参考帧内角度预测模式的中轴夹角最小的目标数量的帧内角度预测模式,包括:当所述纹理复杂度大于预设阈值时,选取在所述参考帧内角度预测模式附近的第一数量的帧内角度预测模式;当所述纹理复杂度小于或等于所述预设阈值时,选取在所述参考帧内角度预测模式附近的第二数量的帧内角度预测模式;其中,所述第一数量小于所述第二数量。5.根据权利要求1所述的方法,其特征在于,所述将所述参考帧内角度预测模式与所述目标数量的帧内角度预测模式作为目标帧内角度预测模式之后,还包括:根据所述目标帧内角度预测模式、非角度预测模式和当前预测单元上侧和/或左侧的预测单元的最优预测模式,确定目标帧内预测模式。6.一种帧内预测模式的确定装置,其特征在于,包括:第一确定单元,用于确定当前预测单元的纹理方向,并从帧内角度预测模式集合中选取与所述纹理方向距离最近的预设数量的参考帧内角度预测模式;获取单元,用于获取所述当前预测单元的纹理复杂度;选择单元,用于根据所述纹理复杂度选取与所述参考帧内角度预测模式的中轴夹角最小的目标数量的帧内角度预测模式;其中,所述纹理复杂度与所述目标数量成正比;第二确定单元,用于将所述参考帧内角度预测模式与所述目标数量的帧内角度预测模
式作为目标帧内角度预测模式。7.根据权利要求6所述的装置,其特征在于,所述第一确定单元包括:第一计算模块,用于依次计算所述帧内角度预测模式集合中每个帧内角度预测模式与所述纹理方向之间的距离;确定模块,用于将与所述纹理方向距离最近的预设数量的参考帧内角度预测模式确定为参考帧内角度预测模式。8.根据权利要求6所述的装置,其特征在于,所述获取单元包括:获取模块,用于通过公式(1)获取所述纹理复杂度:(1)其中,m表示当前预测单元的长,n表示当前预测单元的宽,p
ij
表示当前预测单元中(i,j)位置处的像素值,cf
pu
表示所述当前预测单元的纹理复杂度。9.一种电子设备,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为通过所述计算机程序执行所述权利要求1至5中任一项所述的方法。10.一种计算机可读的存储介质,其特征在于,所述计算机可读的存储介质包括存储的程序,其中,所述程序运行时执行所述权利要求1至5任一项中所述的方法。
技术总结
本发明公开了一种帧内预测模式的确定方法、装置、存储介质及电子设备。其中,上述方法包括:确定当前预测单元的纹理方向,并从帧内角度预测模式集合中选取与所述纹理方向距离最近的预设数量的参考帧内角度预测模式;获取所述当前预测单元的纹理复杂度;根据所述纹理复杂度选取与所述参考帧内角度预测模式的中轴夹角最小的目标数量的帧内角度预测模式;其中,所述纹理复杂度与所述目标数量成正比;将所述参考帧内角度预测模式与所述目标数量的帧内角度预测模式作为目标帧内角度预测模式。本发明解决了相关技术中确定帧内预测模式效率低的技术问题。率低的技术问题。率低的技术问题。
技术研发人员:张鹏 向国庆
受保护的技术使用者:浙江省北大信息技术高等研究院
技术研发日:2022.12.02
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。