技术特征:
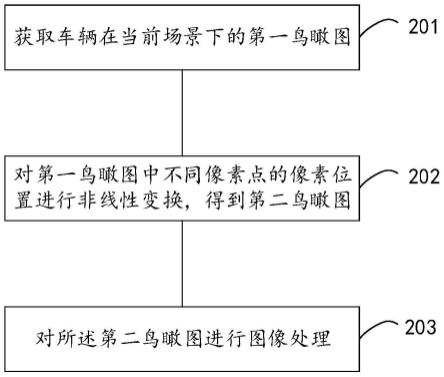
1.一种图像处理方法,其特征在于,该方法包括如下步骤:获取车辆在当前场景下的第一鸟瞰图;在所述第一鸟瞰图中,与所述车辆相距不同像素距离的像素点处的像素精度相同;对所述第一鸟瞰图中不同像素点的像素位置进行非线性变换,得到第二鸟瞰图;在所述第二鸟瞰图中,第二区域的平均像素精度小于第三区域的平均像素精度,所述第二区域中任意像素点与车辆之间的像素距离小于所述第三区域中任意像素点与车辆之间的像素距离;对所述第二鸟瞰图进行图像处理。2.根据权利要求1所述方法,其特征在于,所述对所述第一鸟瞰图中不同像素点的像素位置进行非线性变换,得到第二鸟瞰图,包括:按照预设的非线性变换函数,对所述第一鸟瞰图中不同像素点的像素位置进行非线性变换,得到第二鸟瞰图;其中,所述非线性变换函数的函数曲线的横坐标为第一鸟瞰图中第一像素点与车辆之间的相对像素距离,所述非线性变换函数的函数曲线的纵坐标为第二鸟瞰图中对应所述第一像素点的像素位置与车辆之间的相对像素距离,所述非线性变换函数的函数曲线的拐点为第一鸟瞰图中车辆所在像素点。3.根据权利要求2所述方法,其特征在于,所述非线性变换函数为分段函数。4.根据权利要求2所述方法,其特征在于,所述非线性变换函数为三角函数、反比例函数或指数函数中的其中一种。5.根据权利要求1所述方法,其特征在于,在所述第二区域内,各像素点处的像素精度相同;在所述第三区域内,各像素点处的像素精度相同。6.根据权利要求1所述方法,其特征在于,在所述第二区域内,像素点与所述车辆之间的像素距离越小,对应像素点处的像素精度越小,像素点与所述车辆之间的像素距离越大,对应像素点处的像素精度越大;在所述第三区域内,像素点与所述车辆之间的像素距离越小,对应像素点处的像素精度越小,像素点与所述车辆之间的像素距离越大,对应像素点处的像素精度越大。7.根据权利要求1所述方法,其特征在于,所述第二鸟瞰图中各像素点的像素位置为二维坐标,所述对所述第二鸟瞰图进行图像处理,包括:按照设定步长,在垂直于所述第二鸟瞰图的方向上,为第二鸟瞰图中各像素点的像素位置赋予竖坐标,得到多个三维坐标;将所述多个三维坐标投影到预设的相机平面,得到相机平面像素位置。8.根据权利要求7所述方法,其特征在于,所述对所述第二鸟瞰图进行图像处理,还包括:对所述相机平面像素位置进行特征采样,得到采样结果。9.根据权利要求8所述方法,其特征在于,所述对所述第二鸟瞰图进行图像处理,还包括:根据所述采样结果执行后端任务,得到后端处理结果;按照对所述第一鸟瞰图中不同像素点的像素位置进行非线性变换的方式,对所述后端处理结果进行反变换,得到在所述当前场景下的真实处理结果。
10.一种图像处理装置,其特征在于,所述装置包括:获取模块,用于获取车辆在当前场景下的第一鸟瞰图;在所述第一鸟瞰图中,与所述车辆相距不同像素距离的像素点处的像素精度相同;非线性变换模块,用于对所述第一鸟瞰图中不同像素点的像素位置进行非线性变换,得到第二鸟瞰图;在所述第二鸟瞰图中,第二区域的平均像素精度小于第三区域的平均像素精度,所述第二区域中任意像素点与车辆之间的像素距离小于所述第三区域中任意像素点与车辆之间的像素距离;处理模块,用于对所述第二鸟瞰图进行图像处理。11.根据权利要求10所述装置,其特征在于,所述非线性变换模块包括:非线性变换子模块,用于按照预设的非线性变换函数,对所述第一鸟瞰图中不同像素点的像素位置进行非线性变换,得到第二鸟瞰图;其中,所述非线性变换函数的函数曲线的横坐标为第一鸟瞰图中第一像素点与车辆之间的相对像素距离,所述非线性变换函数的函数曲线的纵坐标为当前场景下对应所述第一像素点的实际位置与车辆之间的相对实际距离,所述非线性变换函数的函数曲线的拐点为第一鸟瞰图中车辆所在像素点。12.根据权利要求11所述装置,其特征在于,所述非线性变换函数为分段函数。13.根据权利要求11所述装置,其特征在于,所述非线性变换函数为三角函数、反比例函数或指数函数中的其中一种。14.根据权利要求10所述装置,其特征在于,在所述第二区域内,各像素点处的像素精度相同;在所述第三区域内,各像素点处的像素精度相同。15.根据权利要求10所述装置,其特征在于,在所述第二区域内,像素点与所述车辆之间的像素距离越小,对应像素点处的像素精度越小,像素点与所述车辆之间的像素距离越大,对应像素点处的像素精度越大;在所述第三区域内,像素点与所述车辆之间的像素距离越小,对应像素点处的像素精度越小,像素点与所述车辆之间的像素距离越大,对应像素点处的像素精度越大。16.根据权利要求10所述装置,其特征在于,所述处理模块包括:抬升模块,用于按照设定步长,在垂直于所述第二鸟瞰图的方向上,为第二鸟瞰图中各像素点的像素位置赋予竖坐标,得到多个三维坐标;所述第二鸟瞰图中各像素点的像素位置为二维坐标;投影模块,用于将所述多个三维坐标投影到预设的相机平面,得到相机平面像素位置。17.根据权利要求16所述装置,其特征在于,所述处理模块还包括:采样模块,用于对所述相机平面像素位置进行特征采样,得到采样结果。18.根据权利要求17所述装置,其特征在于,所述处理模块还包括:后端任务模块,用于根据所述采样结果执行后端任务,得到后端处理结果;反变换模块,用于按照对所述第一鸟瞰图中不同像素点的像素位置进行非线性变换的方式,对所述后端处理结果进行反变换,得到在所述当前场景下的真实处理结果。19.一种电子设备,其特征在于,包括:处理器;用于存储所述处理器可执行指令的存储器;其中,所述处理器被配置为执行所述指令,以实现如权利要求1至9中任意一项所述的
方法。20.一种计算机可读存储介质,其特征在于,当所述计算机可读存储介质中的指令由电子设备的处理器执行时,使得所述电子设备能够执行如权利要求1至9中任意一项所述的方法。
技术总结
本发明提供了一种图像处理方法及装置,方法包括:获取车辆在当前场景下的第一鸟瞰图;在所述第一鸟瞰图中,与所述车辆相距不同像素距离的像素点处的像素精度相同;对所述第一鸟瞰图中不同像素点的像素位置进行非线性变换,得到第二鸟瞰图;在所述第二鸟瞰图中,第二区域的平均像素精度小于第三区域的平均像素精度,所述第二区域中任意像素点与车辆之间的像素距离小于所述第三区域中任意像素点与车辆之间的像素距离;对所述第二鸟瞰图进行图像处理。本发明基于非线性变换对图像进行处理,提高了车辆近处区域的清晰度,扩展了最大感知范围,有利于提供车辆自动驾驶过程的安全性。有利于提供车辆自动驾驶过程的安全性。有利于提供车辆自动驾驶过程的安全性。
技术研发人员:李江涛
受保护的技术使用者:北京鉴智科技有限公司
技术研发日:2022.08.16
技术公布日:2022/12/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。