技术特征:
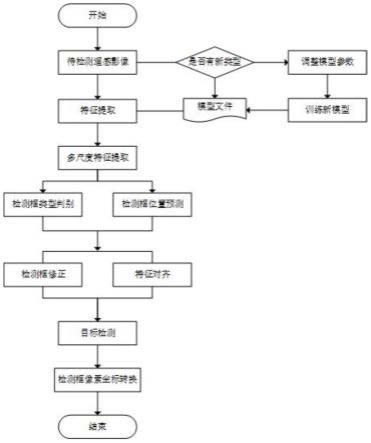
1.一种基于小样本学习的遥感目标检测方法,其特征在于,包括:s1:将待检影像输入特征提取网;s2:将s1中提取的特征输入特征金字塔网络来提取对象的多尺度特征、分类和回归子网的全卷积网络层;s3:构建旋转候选框模块,所述旋转候选框模块包括分类分支和候选框回归分支,所述分类分支负责判定所述旋转候选框内的目标类别,所述候选框回归分支预测候选框的坐标参数;s4:将多个坐标参数构成的预测框解码为绝对位置;s5:将s3和s4预测候选框类别和候选框位置参数送入检测模块,并使用roi对齐模块进行特征提取,提取的特征送到所述分类分支和所述候选框回归分支进行目标分类和定位;s6:将识别的检测框的位置的像素坐标转换为真实的地理坐标;s7:如果模型遇到了新的类别,则需要准备新类别的样本数据,然后调整训练模块中的微调rpn为解冻状态,基础rpn设置为冻结状态不在新的训练中调整;s8:调整检测网络中的新型roi检测器为解冻状态,基础roi检测器为冻结状态,将数据输入训练网络进行重新训练后获取最优模型;s9:用新训练的模型和遥感影像作为输入执行s1-s8的操作,获取目标影像上的检测框和类别等信息。2.根据权利要求1所述的一种基于小样本学习的遥感目标检测方法,其特征在于:所述旋转候选框模块由(x,y,w,h)的四个顶点的坐标表示如下所示:v1=(x,y-h/2) (δα,0)v2=(x w/2,y) (0,δβ)v3=(x,y h/2) (-δα,0)v4=(x-w/2,y) (0,δβ)针对有向候选框的参数结构设计损失函数如下所示:3.根据权利要求1所述的一种基于小样本学习的遥感目标检测方法,其特征在于:所述候选框回归分支采用仿射变换的方法,其公式如下:δ
α
=δα/wδ
w
=log(w/w
a
)δ
h
=log(h/h
a
)δ
x
=(x-x
a
)/w
a
δ
y
=(y-y
a
)/h
aaa
4.根据权利要求1所述的一种基于小样本学习的遥感目标检测方法,其特征在于:所述微调rpn采用平衡候选框来集成预训练的候选框和一个微调候选框,它集成了对象预测头来提升在c
b
和c
n
数据集上候选框的质量,在给定尺寸为h
×
w的特征图层上,基础候选框预测类型的图为微调候选框的预测图为最后平衡候选框的类型图输出为5.根据权利要求4所述的一种基于小样本学习的遥感目标检测方法,其特征在于:所述微调rpn微调阶段的损失函数为6.根据权利要求1所述的一种基于小样本学习的遥感目标检测方法,其特征在于:所述检测网络使用re-detector进行检测,所述re-detector包含两个并行的基础分类分支f
b
和微调分类分支det
b
分别来预测c
b
和c
b
∪c
n
两个数据集上的目标类型,所述基础分类分支f
b
保持相同的权重c
b
数据集上预测对象,所述微调分类分支det
b
通过微调权重以检测在c
n
和c
b
数据集上识别对象。7.根据权利要求6所述的一种基于小样本学习的遥感目标检测方法,其特征在于:采用了一个辅助一致性损失函数来正则化所述微调分类分支det
b
,用kl散度对所述微调分类分支det
b
的与所述基础分类分支f
b
的相似性进行评估,对于c
b
的提议,det
n
被强制预测高置信度,而对于不属于c
b
的提议,det
n
以同样低的概率模仿det
b
给定最终概率,一致性损失函数为:其中
技术总结
本发明涉及遥感影像处理领域,特别涉及一种基于小样本学习的遥感目标检测方法,将待检遥感影像输入特征提取网络,通过多次卷积网络获取高层次的语义特征,将多个层次的特征输入多尺度特征提取模块获取不同尺度上的语义特征;将特征图层输入特征对齐模块,对初步获取的检测框的位置信息和和类别信息;对齐卷积在传统卷积模块的基础上添加了一个偏移字段,这样可以变换轴对齐的卷积将给定位置的特征转换为任意方向。本发明的目的是提供一种基于小样本学习的遥感目标检测方法,具有大幅降低参数量和计算成本的优点。数量和计算成本的优点。数量和计算成本的优点。
技术研发人员:周楠
受保护的技术使用者:苏州喆鑫信息科技有限公司
技术研发日:2022.09.20
技术公布日:2022/12/19
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。