技术特征:
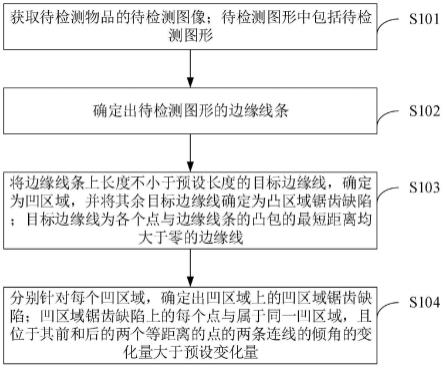
1.一种锯齿缺陷检测方法,其特征在于,包括:获取待检测物品的待检测图像;其中,所述待检测图形中包括待检测图形;确定出所述待检测图形的边缘线条;将所述边缘线条上长度不小于预设长度的目标边缘线,确定为凹区域,并将其余所述目标边缘线确定为凸区域锯齿缺陷;其中,所述目标边缘线为各个点与所述边缘线条的凸包的最短距离均大于零的边缘线;分别针对每个所述凹区域,确定出所述凹区域上的凹区域锯齿缺陷;其中,所述凹区域锯齿缺陷上的每个点与属于同一凹区域,且位于其前和后的两个等距离的点的两条连线的倾角的变化量大于预设变化量。2.根据权利要求1所述的方法,其特征在于,所述获取待检测物品的待检测图像,包括:采集待检测物品的图像;将所述待检测物品的图像中的预设待检测区域,确定为所述待检测物品的待检测图像。3.根据权利要求1所述的方法,其特征在于,所述确定出所述待检测图形的边缘线条,包括:基于预设的二值化阈值,对所述待检测图像进行二值化处理,以将所述待检测图像中的待检测图形和不属于所述待检测图形的区域分别转换为白色和黑色;对二值化处理后的所述待检测图像进行边界跟踪,得到所述待检测图形的边缘线条。4.根据权利要求1所述的方法,其特征在于,所述将所述边缘线条上长度不小于预设长度的目标边缘线,确定为凹区域,并将其余所述目标边缘线确定为凸区域锯齿缺陷,包括:计算所述边缘线条的凸包,并确定出所述边缘线条上每个点与所述边缘线条的凸包的最短距离;确定出所述边缘线条上与所述边缘线条的凸包的最短距离大于零的各个点;将由与所述边缘线条的凸包的最短距离大于零的各个点所组成的每段边缘线确定为所述目标边缘线;分别判断所述目标边缘线的长度是否小于所述预设长度;其中,所述预设长度大于预设的锯齿缺陷最大长度,且小于预设的正常凹区域长度;若判断出所述目标边缘线的长度小于所述预设长度,则将所述目标边缘线确定为凸区域锯齿缺陷;若判断出所述目标边缘线的长度不小于所述预设长度,则将所述目标边缘线确定为凹区域。5.根据权利要求1所述的方法,其特征在于,所述分别针对每个所述凹区域,确定出所述凹区域上的凹区域锯齿缺陷,包括:分别针对每个所述凹区域,依次将所述凹区域中每个点作为目标点;基于所述目标点以及所述目标点对应的参考点的坐标,计算得到所述目标点对应的倾角余弦值;其中,所述目标点对应的倾角余弦值为所述目标点与其对应的第一参考点的连线的倾角的余弦值;所述目标点对应的第一参考点指代所述凹区域上,位于所述目标点后,且与所述目标点的间隔距离为预设间隔距离的点;计算所述目标点对应的倾角余弦值与所述目标点对应的第二参考点对应的倾角余弦
值的差值的绝对值;其中,所述目标点对应的第二参考点为所述凹区域上,位于所述目标点后前,且与所述目标点的间隔距离为预设间隔距离的点;判断所述目标点对应的倾角余弦值与所述目标点对应的第二参考点对应的倾角余弦值的差值的绝对值是否大于所述预设变化量;其中,所述预设变化量等于预设锯齿最小高度与所述预设间隔距离的比值;所述预设间隔距离大于5倍的所述预设锯齿最小高度;若判断出所述目标点对应的倾角余弦值与所述目标点对应的第二参考点对应的倾角余弦值的差值的绝对值大于所述预设变化量,则将所述目标点确定为所述凹区域中的锯齿缺陷点;将所述边缘线条上由连续的所述锯齿缺陷点组成的每段边缘线,分别确定为所述凹区域锯齿缺陷。6.一种锯齿缺陷检测装置,其特征在于,包括:获取单元,用于获取待检测物品的待检测图像;其中,所述待检测图形中包括待检测图形;边缘线确定单元,用于确定出所述待检测图形的边缘线条;第一检测单元,用于将所述边缘线条上长度不小于预设长度的目标边缘线,确定为凹区域,并将其余所述目标边缘线确定为凸区域锯齿缺陷;其中,所述目标边缘线为各个点与所述边缘线条的凸包的最短距离均大于零的边缘线;第二检测单元,用于分别针对每个所述凹区域,确定出所述凹区域上的凹区域锯齿缺陷;其中,所述凹区域锯齿缺陷上的每个点与属于同一凹区域,且位于其前和后的两个等距离的点的两条连线的倾角的变化量大于预设变化量。7.根据权利要求6所述的装置,其特征在于,所述第一检测单元,包括:第一计算单元,用于计算所述边缘线条的凸包,并确定出所述边缘线条上每个点与所述边缘线条的凸包的最短距离;第一确定单元,用于确定出所述边缘线条上与所述边缘线条的凸包的最短距离大于零的各个点;第二确定单元,用于将由与所述边缘线条的凸包的最短距离大于零的各个点所组成的每段边缘线确定为所述目标边缘线;第一判断单元,用于分别判断所述目标边缘线的长度是否小于所述预设长度;其中,所述预设长度大于预设的锯齿缺陷最大长度,且小于预设的正常凹区域长度;凸区域锯齿缺陷确定单元,用于在所述第一判断单元判断出所述目标边缘线的长度小于所述预设长度时,将所述目标边缘线确定为凸区域锯齿缺陷;凹区域确定单元,用于在所述第一判断单元判断出所述目标边缘线的长度不小于所述预设长度时,将所述目标边缘线确定为凹区域。8.根据权利要求6所述的装置,其特征在于,所述第二检测单元,包括:选取单元,用于分别针对每个所述凹区域,依次分别将所述凹区域中每个点作为目标点;第二计算单元,用于基于所述目标点以及所述目标点对应的参考点的坐标,计算得到所述目标点对应的倾角余弦值;其中,所述目标点对应的倾角余弦值为所述目标点与其对应的第一参考点的连线的倾角的余弦值;所述目标点对应的第一参考点指代所述凹区域
上,位于所述目标点后,且与所述目标点的间隔距离为预设间隔距离的点;第三计算单元,用于计算所述目标点对应的倾角余弦值与所述目标点对应的第二参考点对应的倾角余弦值的差值的绝对值;其中,所述目标点对应的第二参考点为所述凹区域上,位于所述目标点后前,且与所述目标点的间隔距离为预设间隔距离的点;第二判断单元,用于判断所述目标点对应的倾角余弦值与所述目标点对应的第二参考点对应的倾角余弦值的差值的绝对值是否大于所述预设变化量;其中,所述预设变化量等于预设锯齿最小高度与所述预设间隔距离的比值;所述预设间隔距离大于5倍的所述预设锯齿最小高度;锯齿缺陷点确定单元,用于在所述第二判断单元判断出所述目标点对应的倾角余弦值与所述目标点对应的第二参考点对应的倾角余弦值的差值的绝对值大于所述预设变化量时,将所述目标点确定为所述凹区域中的锯齿缺陷点;第三确定单元,用于将所述边缘线条上由连续的所述锯齿缺陷点组成的每段边缘线,分别确定为凹区域锯齿缺陷。9.一种电子设备,其特征在于,包括:存储器和处理器;其中,所述存储器用于存储程序;所述处理器用于执行所述程序,所述程序被执行时,具体用于实现如权利要求1至5任意一项所述的锯齿缺陷检测方法。10.一种计算机存储介质,其特征在于,用于存储计算机程序,所述计算机程序被执行时,用于实现如权利要求1至5任意一项所述的锯齿缺陷检测方法。
技术总结
本申请公开了一种锯齿缺陷检测方法及装置、电子设备、计算机存储介质,所述方法包括:获取待检测物品的待检测图像;其中,所述待检测图形中包括待检测图形;确定出所述待检测图形的边缘线条;将所述边缘线条上长度不小于预设长度的目标边缘线,确定为凹区域,并将其余所述目标边缘线确定为凸区域锯齿缺陷;其中,所述目标边缘线为各个点与所述边缘线条的凸包的最短距离均大于零的边缘线;分别针对每个所述凹区域,确定出所述凹区域上的凹区域锯齿缺陷;其中,所述凹区域锯齿缺陷上的每个点与属于同一凹区域,且位于其前和后的两个等距离的点的两条连线的倾角的变化量大于预设变化量。从而实现对待检测图像的锯齿缺陷的准确检测。测。测。
技术研发人员:陈越 王林芳 张炜 梅涛
受保护的技术使用者:北京京东世纪贸易有限公司
技术研发日:2021.06.02
技术公布日:2022/12/19
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。