技术特征:
1.一种街区应急场景空地协同立体感知方法,其特征在于,包括:以街区应急事件为中心,将每种类型的观测设备作为一个基本事件,构建空地协同的观测规划模型;构建街区感知网络的资源描述本体模型,基于所述资源描述本体模型建立推理规则以实现网络规划;对若干观测设备获得的多源终端异构数据进行汇聚和组织,得到空地协同观测数据;对所述空地协同观测数据及其反演数据进行融合地理信息显示,实现街区应急场景的立体感知。2.根据权利要求1所述的街区应急场景空地协同立体感知方法,其特征在于,构建空地协同的观测规划模型时,在时间、空间和事件三个属性方面进行协同建模;构建协同观测函数h
α
,如下:式中,表示第i个种类的观测设备在事件观测任务中的时间参数,表示第i个种类的观测设备在事件观测任务中的空间参数,表示第i个种类的观测设备在事件观测任务中的观测要素参数,n表示不同种类观测设备的总数量;基于所述协同观测函数,判断各类观测设备是否能够加入协同观测;针对第i个种类的观测设备,当该类观测设备满足时,将该类观测设备加入协同观测;结合所述时间参数、所述空间参数和所述观测要素参数,对加入协同观测的观测设备进行权值设置,所述权值用于表征不同种类的观测设备的优先级。3.根据权利要求2所述的街区应急场景空地协同立体感知方法,其特征在于,构建空地协同的观测规划模型时还包括设置置信度,基于所述置信度调节不同种类的观测设备的作用程度,以得到最佳观测方案;所述置信度包括表征观测时效性能的第一指标、表征观测空间覆盖率的第二指标和表征观测要素性能的第三指标;所述第一指标表示一类观测设备在单位时间内能够覆盖的观测区域比例,如下:所述第一指标表示一类观测设备在单位时间内能够覆盖的观测区域比例,如下:式中,η
t
表示第一指标,s
i
表示该类观测设备中第i个观测器件能够观测的空间范围,m表示该类观测设备中观测器件的总数量,s表示事件观测任务需要观测的空间范围的集合,t
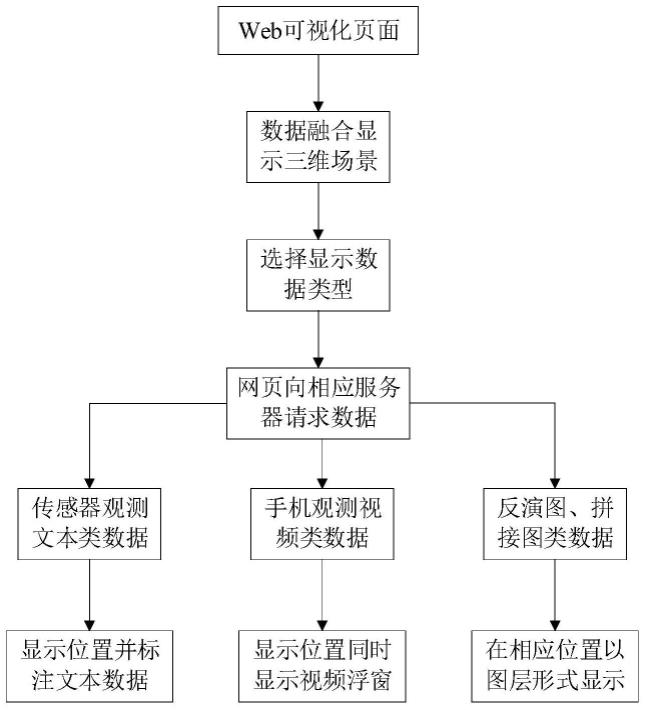
α
表示该类观测设备能够实现观测任务需求的时间窗口值,t
is
表示该类观测设备中第i个观测器件针对观测任务需求的开始时间,t
ie
表示该类观测设备中第i个观测器件针对观测任务需求的结束时间;表示该类观测设备中第i个观测器件在时间窗口范围内的观测
状态指标,若该观测器件的时间窗口与观测任务需求的时间窗口有交集则为1,若无交集则为0;所述第二指标表示一类观测设备的观测空间对复合事件目标的总覆盖程度,如下:式中,η
s
表示第二指标;所述第三指标表示协同观测设备对复合事件需求属性的匹配程度,如下:式中,η
n
表示第三指标,k表示复合事件中包含的观测基本事件的类别数量;表示针对复合事件中的第j类观测基本事件,第i个种类的观测设备能够实现观测任务需求的权重;表示第i个种类的观测设备的观测性能状态指标,若该类观测设备的观测情况满足观测任务需求则为1,否则为0;m
i
表示第i个种类的观测设备能够实现观测任务需求的观测要素的数量。4.根据权利要求1所述的街区应急场景空地协同立体感知方法,其特征在于,实现网络规划时,将感知层观测资源、网络层通信资源和应用层资源作为三个一级类,并基于各一级类的层次结构进行内部级类下分,形成所述资源描述本体模型;在已构建的所述资源描述本体模型上,基于感知层、网络层和应用层在网络规划中的约束关系构建swrl规则;接收到网络规划方案请求后,通过所述资源描述本体模型进行实例映射,采用所述swrl规则进行逻辑推理,生成各层资源匹配的网络规划方案。5.根据权利要求4所述的街区应急场景空地协同立体感知方法,其特征在于,所述感知层观测资源包括以下四个二级类:设备的基本属性、观测属性、网络属性和数据属性;所述设备的基本属性包括设备id、设备名称和设备型号;所述观测属性包括移动属性、测量属性和位置属性;所述移动属性包括可移动性和移动范围,所述测量属性包括采样频率和测量范围,所述位置属性包括经度和纬度;所述数据属性包括数据类型、数据格式、数据包大小和数据上报频率;所述网络属性包括支持接口和传输需求;所述网络层通信资源包括以下两个二级类:网络的基本属性和传输属性;所述网络的基本属性包括id、名称、经度、纬度、覆盖半径、节点容量和组网方式;所述传输属性包括网络延时、传输速度和传输带宽。6.根据权利要求5所述的街区应急场景空地协同立体感知方法,其特征在于,采用swrl规则进行逻辑推理时的匹配流程包括:构建第一网络规划目标和第二网络规划目标;所述第一网络规划目标为实现所述感知层观测资源通过所述网络层通信资源与所述应用层资源的服务器建立通信连接,所述服务器能接收到所述感知层观测资源采集的数据;所述第二网络规划目标为提升网络传输性能,降低网络延时,提高网络覆盖率,降低丢包率;
基于所述感知层观测资源的所述网络数据和所述观测属性、所述网络层通信资源的所述网络的基本属性,以及所述应用层资源的带宽,围绕所述第一网络规划目标,建立基本组网规则;基于所述感知层观测资源的所述数据属性和所述网络层通信资源的所述传输属性,围绕所述第二网络规划目标,建立网络性能提升规则。7.根据权利要求1所述的街区应急场景空地协同立体感知方法,其特征在于,对若干观测设备获得的多源终端异构数据进行汇聚和组织时,将所述多源异构数据根据数据结构划分为结构化数据与非结构化数据,所述结构化数据和所述非结构化数据并行、分通道地传输至数据汇聚平台;所述数据汇聚平台基于数据结构和语义关联进行存储;其中,每个观测设备注册有一个node id作为该观测设备的id,同一观测设备采集的异构数据通过node id进行关联。8.根据权利要求1所述的街区应急场景空地协同立体感知方法,其特征在于,进行融合地理信息显示时的数据包括:文本格式的第一类数据、视频格式的第二类数据和影像格式的第三类数据;所述第一类数据包括地面移动传感器观测数据,所述第二类数据包括地面手机观测数据,所述第三类数据包括观测反演图和观测拼接图;其中,所述观测反演图的获得方式为:对所述空地协同观测数据进行时空匹配得到数据集,基于所述数据集建立反演模型计算生成所述观测反演图;所述第一类数据、所述第二类数据、所述第三类数据均包括数据本身和数据对应的地理位置坐标;通过所述地理位置坐标将数据与地理信息系统平台的三维场景进行关联和融合显示;其中,所述第一类数据以文本标注框的形式显示在三维场景中的相应位置;所述第二类数据以浮窗形式显示视频,同时根据地理位置坐标在三维场景中标注其移动轨迹;所述第三类数据以图层形式显示在三维场景中的相应位置。9.一种街区应急场景空地协同立体感知系统,其特征在于,包括:观测规划单元,用于以街区应急事件为中心,将每种类型的观测设备作为一个基本事件,构建空地协同的观测规划模型;网络规划单元,用于构建街区感知网络的资源描述本体模型,基于所述资源描述本体模型建立推理规则以实现网络规划;数据汇聚组织单元,用于对若干观测设备获得的多源终端异构数据进行汇聚和组织,得到空地协同观测数据;融合显示单元,用于对所述空地协同观测数据及其反演数据进行融合地理信息显示,实现街区应急场景的立体感知;所述街区应急场景空地协同立体感知系统用于实现如权利要求1-8中任一项所述的街区应急场景空地协同立体感知方法中的步骤。
技术总结
本发明属于智慧城市与物联网技术领域,公开了一种街区应急场景空地协同立体感知方法与系统,本发明以街区应急事件为中心,将每种类型的观测设备作为一个基本事件,构建空地协同的观测规划模型;构建街区感知网络的资源描述本体模型,基于资源描述本体模型建立推理规则以实现网络规划;对若干观测设备获得的多源终端异构数据进行汇聚和组织,得到空地协同观测数据;对空地协同观测数据及其反演数据进行融合地理信息显示,实现街区应急场景的立体感知。本发明能够实现应急场景下街区观测要素的实时反映可视化,能够支撑突发应急事件体制和机制高效运行,以科学有序高效地应对突发应急事件。事件。事件。
技术研发人员:卜方玲 曾德忠 徐雁菲 张文怡 曾艺雯 王梦婷 陈能成
受保护的技术使用者:武汉大学
技术研发日:2022.08.03
技术公布日:2022/12/12
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。