技术特征:
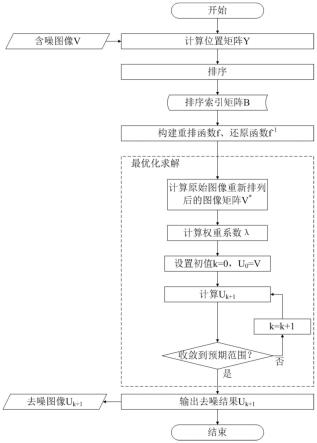
1.一种跨轨宽幅扫描相机的条带噪声抑制方法,其特征在于,包括:步骤s1:基于原始影像数据矩阵计算每一像素在沿轨方向的位置,形成位置矩阵;步骤s2:根据位置矩阵计算排序索引矩阵,基于排序索引矩阵构建重排函数与还原函数;步骤s3:基于跨轨方向变分以及沿轨方向重排后的变分数据,构建最优化问题并进行迭代求解。2.根据权利要求1所述的跨轨宽幅扫描相机的条带噪声抑制方法,其特征在于,所述步骤s1采用:基于尺寸为m行、n列的原始影像数据矩阵v计算每一像素v(i,j)在沿轨方向的位置y(i,j),其中,i表示行号,i=1,2,......,m;j表示列号,j=1,2,......,n;形成尺寸为m行,n列的位置矩阵y。3.根据权利要求2所述的跨轨宽幅扫描相机的条带噪声抑制方法,其特征在于,所述步骤s1采用:当跨轨宽幅扫描相机线阵共包含p个像元,则原始影像数据矩阵v以p行数据为一个扫描周期,位置矩阵y的计算方法按照扫描周期进行计算,若y(i,j)为第t个周期的第t像元,则行号i=(t-1)p t;y(i,j)=(t-0.5(p 1))α(j) 0.5(p 1) (t-1)p
ꢀꢀꢀꢀ
(1)其中,系数α(j)为距离放大因子,计算方法为α(j)=l(j)/l0ꢀꢀꢀꢀ
(2)其中,l0为相机星下点观测时探测器中心对应的视线距离;l(j)为第j列数据成像时刻探测器中心对应的视线距离。4.根据权利要求1所述的跨轨宽幅扫描相机的条带噪声抑制方法,其特征在于,所述步骤s2采用:对位置矩阵y的每一列[y(1,j),y(2,j),
……
,y(m,j)]
t
,按照由小到大排序,并存储排序索引[b(1,j),b(2,j),
……
,b(m,j)]
t
,y(b(1,j),j)≤y(b(2,j),j)≤
……
≤y(b(m,j),j);其中,t表示转置;由每一列的排序索引,得到尺寸为m行、n列的排序索引矩阵b,按照排序索引矩阵b对数据矩阵v进行重新排序的操作记为重排函数f,原始数据矩阵v重新排序后的矩阵记为v
*
;将重排后的矩阵v
*
还原至原始位置的操作记为还原函数f-1
;v=f-1
(v
*
)
ꢀꢀꢀꢀ
(4)v(b(i,j),j)=v
*
(i,j)
ꢀꢀꢀꢀ
(5)。5.根据权利要求1所述的跨轨宽幅扫描相机的条带噪声抑制方法,其特征在于,所述步骤s3采用:跨轨与沿轨方向的变分计算采用如下方法:骤s3采用:跨轨与沿轨方向的变分计算采用如下方法:
其中,分别为跨轨和沿轨方向的梯度算子;分别为跨轨和沿轨方向的梯度算子;其中,系数ε1、系数ε2为恒定的正常数;可由公式8同理获得。6.根据权利要求5所述的跨轨宽幅扫描相机的条带噪声抑制方法,其特征在于,所述最优化问题采用:其中,表示最优解;u表示最优化问题的自变量;λ表示权重系数;函数g
x
表示跨轨方向的图像变分,函数g
y
表示沿轨方向的图像变分;u
*
表示矩阵u按照排序索引矩阵b进行重新排列后的矩阵。7.根据权利要求6所述的跨轨宽幅扫描相机的条带噪声抑制方法,其特征在于,所述权重系数λ用于权衡图像在跨轨方向的保真性与在沿轨方向的平滑性;权重系数λ可通过如下方法进行计算:λ=g
y
(v
*
)/g
x
(v)
ꢀꢀꢀꢀ
(11)。8.根据权利要求7所述的跨轨宽幅扫描相机的条带噪声抑制方法,其特征在于,最优化问题求解采用如下迭代计算方法,初值k=0,u0=v,其中,k为迭代步数,u
k
为第(k-1)步迭代得到的结果,为对u
k
进行重排的图像,当|u
k 1-u
k
|小于设定阈值时终止迭代。9.一种跨轨宽幅扫描相机的条带噪声抑制系统,其特征在于,包括:模块m1:基于原始影像数据矩阵计算每一像素在沿轨方向的位置,形成位置矩阵;模块m2:根据位置矩阵计算排序索引矩阵,基于排序索引矩阵构建重排函数与还原函数;模块m3:基于跨轨方向变分以及沿轨方向重排后的变分数据,构建最优化问题并进行迭代求解。10.根据权利要求9所述的跨轨宽幅扫描相机的条带噪声抑制系统,其特征在于,所述模块m1采用:基于尺寸为m行、n列的原始影像数据矩阵v计算每一像素v(i,j)在沿轨方向的位置y(i,j),其中,i表示行号,i=1,2,......,m;j表示列号,j=1,2,......,n;形成尺寸为m行,n列的位置矩阵y;所述模块m1采用:当跨轨宽幅扫描相机线阵共包含p个像元,则原始影像数据矩阵v以p行数据为一个扫
描周期,位置矩阵y的计算方法按照扫描周期进行计算,若y(i,j)为第t个周期的第t像元,则行号i=(t-1)p t;y(i,j)=(t-0.5(p 1))α(j) 0.5(p 1) (t-1)p
ꢀꢀꢀꢀ
(1)其中,系数α(j)为距离放大因子,计算方法为α(j)=l(j)/l0ꢀꢀꢀꢀ
(2)其中,l0为相机星下点观测时探测器中心对应的视线距离;l(j)为第j列数据成像时刻探测器中心对应的视线距离;所述模块m2采用:对位置矩阵y的每一列[y(1,j),y(2,j),
……
,y(m,j)]
t
,按照由小到大排序,并存储排序索引[b(1,j),b(2,j),
……
,b(m,j)]
t
,y(b(1,j),j)≤y(b(2,j),j)≤
……
≤y(b(m,j),j);其中,t表示转置;由每一列的排序索引,得到尺寸为m行、n列的排序索引矩阵b,按照排序索引矩阵b对数据矩阵v进行重新排序的操作记为重排函数f,原始数据矩阵v重新排序后的矩阵记为v
*
;将重排后的矩阵v
*
还原至原始位置的操作记为还原函数f-1
;v=f-1
(v
*
)
ꢀꢀꢀꢀ
(4)v(b(i,j),j)=v
*
(i,j)
ꢀꢀꢀꢀ
(5);所述模块m3采用:跨轨与沿轨方向的变分计算采用如下方法:所述模块m3采用:跨轨与沿轨方向的变分计算采用如下方法:其中,分别为跨轨和沿轨方向的梯度算子;分别为跨轨和沿轨方向的梯度算子;其中,系数ε1、系数ε2为恒定的正常数;可由公式8同理获得;所述最优化问题采用:其中,表示最优解;u表示最优化问题的自变量;λ表示权重系数;函数g
x
表示跨轨方向的图像变分,函数g
y
表示沿轨方向的图像变分;u
*
表示矩阵u按照排序索引矩阵b进行重新排列后的矩阵;
所述权重系数λ用于权衡图像在跨轨方向的保真性与在沿轨方向的平滑性;权重系数λ可通过如下方法进行计算:λ=g
y
(v
*
)/g
x
(v)
ꢀꢀꢀꢀ
(11);最优化问题求解采用如下迭代计算方法,初值k=0,u0=v,其中,k为迭代步数,u
k
为第(k-1)步迭代得到的结果,为对u
k
进行重排的图像,当|u
k 1-u
k
|小于设定阈值时终止迭代。
技术总结
本发明提供了一种跨轨宽幅扫描相机的条带噪声抑制方法及系统,包括:步骤S1:对原始影像数据矩阵计算每一像素在沿轨方向的位置,形成位置矩阵;步骤S2:根据位置矩阵计算排序索引矩阵,基于排序索引矩阵构建重排函数与还原函数;步骤S3:基于跨轨方向变分以及沿轨方向重排后的变分数据,构建最优化问题并进行迭代求解。本发明在去除条带噪声的同时保留地球曲率造成的图像非连续性,可以提升图像质量,不影响定量化应用,实施方便,能普遍适用于跨轨宽幅扫描相机的条带噪声抑制。宽幅扫描相机的条带噪声抑制。宽幅扫描相机的条带噪声抑制。
技术研发人员:郭玲玲 王鑫 汪少林 周军 代海山 桑峰 林两魁
受保护的技术使用者:上海卫星工程研究所
技术研发日:2022.08.05
技术公布日:2022/12/5
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。