技术特征:
1.一种计算系统,包括:通信接口,被配置为与机器人以及与具有相机视场的相机进行通信;至少一个处理电路,被配置为当一个或多个物体处于或者已经处于所述相机视场中时,执行以下:获取表示所述一个或多个物体中的第一物体的图像信息,其中所述图像信息由所述相机生成并且描述与第一物体相关联的至少物体外观;确定指示所述图像信息与模型模板的视觉描述信息之间的匹配程度的第一模板匹配分数,其中所述视觉描述信息描述物体外观;基于表示第一物体的所述图像信息确定图像边缘信息,其中所述图像边缘信息标识从所述图像信息中检测到的第一组一个或多个边缘,或者指示从所述图像信息中没有检测到边缘;确定模板边缘信息,其中所述模板边缘信息标识从所述模型模板的所述视觉描述信息中检测到的第二组一个或多个边缘,或者指示从所述视觉描述信息中没有检测到边缘;确定指示所述图像边缘信息与所述模板边缘信息之间的匹配程度的第二模板匹配分数;基于第一模板匹配分数和第二模板匹配分数确定总体模板匹配分数;以及基于所述总体模板匹配分数执行机器人交互计划操作,其中所述机器人交互计划操作用于计划所述机器人与第一物体之间的机器人交互。2.如权利要求1所述的计算系统,其中所述至少一个处理电路被配置为,当从所述图像信息中检测到第一组一个或多个边缘时,生成所述图像边缘信息作为标识第一组一个或多个边缘位于何处的第一边缘位图,以及其中所述至少一个处理电路被配置为基于第一边缘位图和第二边缘位图之间的比较生成第二模板匹配分数,其中第二边缘位图基于所述视觉描述信息标识所述模型模板中第二组一个或多个边缘位于何处。3.如权利要求2所述的计算系统,其中所述至少一个处理电路被配置为,基于从所述图像信息检测到的第一组一个或多个边缘与来自所述模型模板的所述视觉描述信息的第二组一个或多个边缘重叠的最大量,来确定第二模板匹配分数。4.如权利要求3所述的计算系统,其中所述至少一个处理电路被配置为以独立于第一模板匹配分数的方式确定第二模板匹配分数。5.如权利要求2所述的计算系统,其中第一边缘位图是至少包括被分配第一像素值的区域像素的第一二进制位图,其中,当从所述图像信息中检测到第一组一个或多个边缘时,第一二进制位图还包括边缘像素,其中第一二进制位图的所述边缘像素是其对应于所述图像信息中检测到第一组一个或多个边缘的位置的像素,其中第一二进制位图的边缘像素被分配第二像素值,其中第二边缘位图是至少包括被分配第一像素值的区域像素的第二二进制位图,以及其中,当从所述模型模板的所述视觉描述信息中检测到第二组一个或多个边缘时,第二二进制位图还包括边缘像素,其中第二二进制位图的所述边缘像素是其对应于所述视觉描述信息中检测到第二组一个或多个边缘的位置的像素,并且其中第二二进制位图的所述边缘像素被分配第二像素值。
6.如权利要求5所述的计算系统,其中所述至少一个处理电路被配置为,基于第一二进制位图的所述边缘像素与第二二进制位图的所述边缘像素重叠的最大量来确定第二模板匹配分数。7.如权利要求5所述的计算系统,其中所述至少一个处理电路被配置为针对第一组一个或多个边缘中的每个边缘,基于从所述图像信息来检测所述边缘的技术来确定所述边缘的相应优先级,其中第二模板匹配分数基于与第一组一个或多个边缘相关联的一个或多个相应优先级。8.如权利要求7所述的计算系统,其中所述至少一个处理电路被配置为基于以下技术中的哪种技术被用于检测边缘而确定第一组一个或多个边缘的每个边缘的相应优先级:(i)在所述边缘处,满足定义的像素强度不连续条件或定义的尖峰像素强度条件,(ii)在所述边缘处,满足定义的深度不连续条件,或(iii)在所述边缘处,满足定义的朝向不连续条件。9.如权利要求2所述的计算系统,其中所述至少一个处理电路被配置为,基于所述图像信息的范围与所述视觉描述信息的对应范围之间的匹配程度来确定第一模板匹配分数。10.如权利要求2所述的计算系统,其中当所述模型模板的所述视觉描述信息包括形成模板2d范围的像素时,所述至少一个处理电路被配置为,基于所述模板2d范围与来自所述图像信息或基于所述图像信息生成的对应图像2d范围之间的匹配程度来确定第一模板匹配分数。11.如权利要求10所述的计算系统,其中所述至少一个处理电路被配置为,通过基于所述图像信息生成和与所述模型模板的所述视觉描述信息相关联的物体姿势、视点、或者照明条件中的至少一个相匹配的变换后的图像信息,来执行图像归一化操作,以及其中所述对应的图像2d范围来自所述变换后的图像信息。12.如权利要求10所述的计算系统,其中所述至少一个处理电路被配置为基于重叠大小来确定第一模板匹配分数,所述重叠大小指示当与所述图像2d范围的对应像素进行比较时,所述模板2d范围中有多少像素满足定义的像素强度相似性条件。13.如权利要求1所述的计算系统,其中所述至少一个处理电路被配置为,基于第一模板匹配分数和第二模板匹配分数的加权组合来确定所述总体模板匹配分数。14.如权利要求1所述的计算系统,其中所述至少一个处理电路被配置为,当第一物体在所述相机视场中时,确定第一物体的部分是否未被所述图像信息描述,以及响应于确定第一物体的所述部分未被所述图像信息描述,生成排除了所述视觉描述信息的对应部分的所述视觉描述信息的遮蔽版本,并基于所述视觉描述信息的所述遮蔽版本确定第一模板匹配分数并确定所述模板边缘信息。15.一种非暂时性计算机可读介质,包括用于由与具有视场的相机通信并被配置的至少一个处理电路执行的指令,当一个或多个物体处于或者已经处于所述视场中时,所述指令被配置为:获取表示所述一个或多个物体中的第一物体的图像信息,其中所述图像信息由所述相机生成并且描述与第一物体相关联的至少物体外观;确定指示所述图像信息与模型模板的视觉描述信息之间的匹配程度的第一模板匹配
分数,其中所述视觉描述信息描述物体外观;基于表示第一物体的所述图像信息确定图像边缘信息,其中所述图像边缘信息标识从所述图像信息中检测到的第一组一个或多个边缘,或者指示从所述图像信息中没有检测到边缘;确定模板边缘信息,其中所述模板边缘信息标识从所述模型模板的所述视觉描述信息中检测到的第二组一个或多个边缘,或者指示从所述视觉描述信息中没有检测到边缘;确定指示所述图像边缘信息与所述模板边缘信息之间的匹配程度的第二模板匹配分数;基于第一模板匹配分数和第二模板匹配分数确定总体模板匹配分数;以及基于所述总体模板匹配分数执行机器人交互计划操作,其中所述机器人交互计划操作用于计划所述机器人与第一物体之间的机器人交互。16.如权利要求15所述的非暂时性计算机可读介质,其中当所述指令被附加地配置为,当从所述图像信息中检测到第一组一个或多个边缘时,生成所述图像边缘信息作为标识第一组一个或多个边缘位于何处的第一边缘位图,以及其中所述至少一个处理电路被配置为,基于第一边缘位图和第二边缘位图之间的比较生成第二模板匹配分数,其中第二边缘位图基于所述视觉描述信息标识所述模型模板中第二组一个或多个边缘位于何处。17.如权利要求16所述的非暂时性计算机可读介质,其中所述指令被附加地配置为,基于从所述图像信息检测到的第一组一个或多个边缘与来自所述模型模板的所述视觉描述信息的第二组一个或多个边缘重叠的最大量,来确定第二模板匹配分数。18.一种控制机器人系统的方法,所述机器人系统包括非暂时性计算机可读介质、与具有视场的相机通信并被配置为执行指令的至少一个处理电路,所述方法包括:获取表示所述一个或多个物体中的第一物体的图像信息,其中所述图像信息由所述相机生成并且描述与第一物体相关联的至少物体外观;确定指示所述图像信息与模型模板的视觉描述信息之间的匹配程度的第一模板匹配分数,其中所述视觉描述信息描述物体外观;基于表示第一物体的所述图像信息确定图像边缘信息,其中所述图像边缘信息标识从所述图像信息中检测到的第一组一个或多个边缘,或者指示从所述图像信息中没有检测到边缘;确定模板边缘信息,其中所述模板边缘信息标识从所述模型模板的所述视觉描述信息中检测到的第二组一个或多个边缘,或者指示从所述视觉描述信息中没有检测到边缘;确定指示所述图像边缘信息与所述模板边缘信息之间的匹配程度的第二模板匹配分数;基于第一模板匹配分数和第二模板匹配分数确定总体模板匹配分数;以及基于所述总体模板匹配分数执行机器人交互计划操作,其中所述机器人交互计划操作用于计划所述机器人与第一物体之间的机器人交互。19.如权利要求18所述的方法,其中当所述指令被附加地配置为,当从所述图像信息中检测到第一组一个或多个边缘时,生成所述图像边缘信息作为标识第一组一个或多个边缘位于何处的第一边缘位图,以及
其中所述至少一个处理电路被配置为,基于第一边缘位图和第二边缘位图之间的比较生成第二模板匹配分数,其中第二边缘位图基于所述视觉描述信息标识所述模型模板中第二组一个或多个边缘位于何处。20.如权利要求19所述的方法,其中所述指令被附加地配置为,基于从所述图像信息检测到的第一组一个或多个边缘与来自所述模型模板的所述视觉描述信息的第二组一个或多个边缘重叠的最大量,来确定第二模板匹配分数。
技术总结
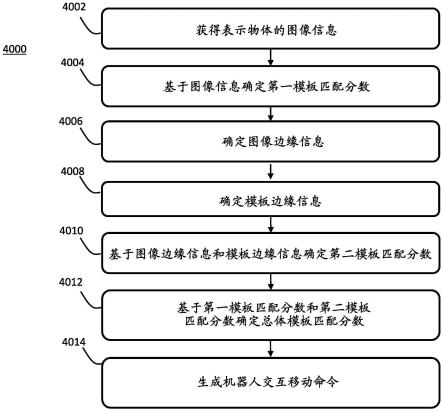
本公开涉及用于执行物体检测的方法和计算系统。一种计算系统,包括通信接口和处理电路。通信接口与机器人和具有视场的相机通信。处理电路基于视场内的物体执行获取图像信息并确定第一模板匹配分数,该第一模板匹配分数指示图像信息与模型模板之间的匹配程度。处理电路还基于图像信息确定图像边缘信息,并确定指示图像边缘信息与模板之间的匹配程度的第二模板匹配分数。处理电路还基于第一模板匹配分数和第二模板匹配分数确定总体模板匹配分数。数。数。
技术研发人员:哈姆迪
受保护的技术使用者:牧今科技
技术研发日:2022.04.29
技术公布日:2022/11/22
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。