技术特征:
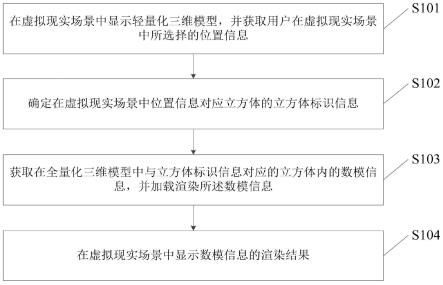
1.一种虚拟现实显示方法,其特征在于,所述方法包括:在虚拟现实场景中显示轻量化三维模型,并获取用户在虚拟现实场景中所选择的位置信息;确定在所述虚拟现实场景中所述位置信息对应立方体的立方体标识信息,所述轻量化三维模型被划分成多个立方体;获取在全量化三维模型中与所述立方体标识信息对应的立方体内的数模信息,并加载渲染所述数模信息;所述全量化三维模型与所述轻量化三维模型采用同样的方式划分成多个立方体;在所述虚拟现实场景中显示所述数模信息的渲染结果。2.根据权利要求1所述的方法,其特征在于,所述方法还包括:对所述轻量化三维模型中进行预处理,得到所述轻量化三维模型中各个立方体分别对应的立方体标识信息;在预置位置对应存储所述立方体标识信息及立方体标识信息对应立方体内的数模信息。3.根据权利要求2所述的方法,其特征在于,所述对所述轻量化三维模型中进行预处理,得到所述轻量化三维模型中各个立方体分别对应的立方体标识信息,包括:cad数模离散表示成三角面片数模,并将所有的三角面片数模放入到能被包含且没有子节点的立方体中;将所述立方体划分成八等份,并将所述立方体中的三角面片数模分给对应的子立方体;若划分立方体的次数未达到最大递归深度值,则继续将所述子立方体划分成八等份;根据各个立方体之间的位置关系,确定各个立方体分别对应的立方体标识信息。4.根据权利要求3所述的方法,其特征在于,所述继续将所述子立方体划分成八等份之前,所述方法还包括:若确定所述子立方体所分配到的三角面片数模的数量不为零且其子立方体中的三角面片数模均属于同一个对象模型,则停止对所述子立方体的八等份划分;或若确定所述子立方体所分配到的三角面片数模的数量为零,则停止对所述子立方体的八等份划分。5.根据权利要求3所述的方法,其特征在于,所述方法还包括:根据虚拟现实场景中需要精确显示的最小对象模型尺寸与虚拟现实场景整体尺寸的比值确定所述最大递归深度值。6.根据权利要求5所述的方法,其特征在于,所述最小对象模型尺寸为x,所述虚拟现实场景整体尺寸为y,所述最大递归深度为n,则有x*8^n<=y且x*8^(n 1)>=y。7.根据权利要求1-6任一项所述的方法,其特征在于,所述获取用户在虚拟现实场景中所选择的位置信息,包括:获取用户手柄的6dof信息,并将所述手柄的6dof信息转换为在虚拟现实场景中位置信息;所述位置信息为位置区域或位置点。8.一种虚拟现实显示装置,其特征在于,所述装置包括:获取模块,用于在虚拟现实场景中显示轻量化三维模型,并获取用户在虚拟现实场景
中所选择的位置信息;确定模块,用于确定在所述虚拟现实场景中所述位置信息对应立方体的立方体标识信息,所述轻量化三维模型被划分成多个立方体;渲染模块,用于获取在全量化三维模型中与所述立方体标识信息对应的立方体内的数模信息,并加载渲染所述数模信息;所述全量化三维模型与所述轻量化三维模型采用同样的方式划分成多个立方体;显示模块,用于在所述虚拟现实场景中显示所述数模信息的渲染结果。9.一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述虚拟现实显示方法。10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述虚拟现实显示方法。
技术总结
本发明公开了一种虚拟现实显示方法、装置、计算机设备及存储介质,用于在提高虚拟现实的显示精度的同时,减少虚拟现实的渲染负担。主要技术方案为:在虚拟现实场景中显示轻量化三维模型,并获取用户在虚拟现实场景中所选择的位置信息;确定在所述虚拟现实场景中所述位置信息对应立方体的立方体标识信息,所述轻量化三维模型被划分成多个立方体;获取在全量化三维模型中与所述立方体标识信息对应的立方体内的数模信息,并加载渲染所述数模信息;在所述虚拟现实场景中显示所述数模信息的渲染结果。渲染结果。渲染结果。
技术研发人员:许澍虹 吕毅 薛阳 成天壮 王大伟 杨志刚
受保护的技术使用者:中国商用飞机有限责任公司
技术研发日:2022.09.01
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。