技术特征:
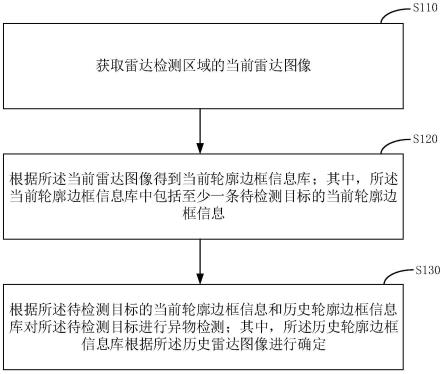
1.一种基于雷达图的地面异物检测方法,其特征在于,包括:获取雷达检测区域的当前雷达图像;根据所述当前雷达图像得到当前轮廓边框信息库;其中,所述当前轮廓边框信息库中包括至少一条待检测目标的当前轮廓边框信息;根据所述待检测目标的当前轮廓边框信息和历史轮廓边框信息库对所述待检测目标进行异物检测;其中,所述历史轮廓边框信息库根据所述历史雷达图像进行确定。2.根据权利要求1所述的方法,其特征在于,当前轮廓边框信息中包括轮廓边框位置信息;所述历史轮廓边框信息库中包括至少一条历史轮廓边框信息,所述历史轮廓边框信息中至少包括轮廓边框位置信息和轮廓边框属性信息;相应的,根据所述待检测目标的当前轮廓边框信息和历史轮廓边框信息库对所述待检测目标进行异物检测,包括:对所述历史轮廓边框信息库中的历史轮廓边框信息进行遍历,根据所述轮廓边框位置信息依次确定所述历史轮廓边框信息与当前轮廓边框信息库中各当前轮廓边框信息的重合度;在所述当前轮廓边框信息库中确定与所述历史轮廓边框信息重合度最高的目标当前轮廓边框信息;根据所述重合度对所述历史轮廓边框信息的轮廓边框属性信息进行更新;根据更新后的轮廓边框属性信息对所述目标当前轮廓边框信息对应的待检测目标进行异物检测。3.根据权利要求2所述的方法,其特征在于,所述轮廓边框属性信息至少包括连续无目标关联帧数和连续静止帧数;相应的,根据所述重合度对所述历史轮廓边框信息的轮廓边框属性信息进行更新,包括:若所述重合度大于或等于预设重合度阈值,则对所述连续静止帧数进行更新计数,对所述连续无目标关联帧数置零;若所述重合度小于预设重合度阈值,则对所述连续无目标关联帧数更新计数,对所述连续静止帧数置零。4.根据权利要求3所述的方法,其特征在于,根据更新后的轮廓边框属性信息对所述目标当前轮廓边框信息对应的待检测目标进行异物检测,包括:若更新后的所述连续静止帧数大于预设连续静止帧数阈值,则确定所述目标当前轮廓边框信息对应的待检测目标为异物,并将所述目标当前轮廓边框信息从当前轮廓边框信息库进行删除。5.根据权利要求3所述的方法,其特征在于,在根据更新后的轮廓边框属性信息对所述目标当前轮廓边框信息对应的待检测目标进行异物检测之后,所述方法还包括:若更新后的所述连续无目标关联帧数大于预设连续无目标关联帧数阈值,则将所述历史轮廓边框信息从历史轮廓边框信息库中删除。6.根据权利要求4所述的方法,其特征在于,在根据更新后的轮廓边框属性信息对所述目标当前轮廓边框信息对应的待检测目标进行异物检测之后,所述方法还包括:根据所述当前轮廓边框信息库中的剩余当前轮廓边框信息在所述历史轮廓边框信息
库中添加新的历史轮廓边框信息,并对所述新的历史轮廓边框信息的轮廓边框属性信息进行初始化设置。7.根据权利要求2所述的方法,其特征在于,所述轮廓边框位置信息为最小外接矩形边界框信息;相应的,根据所述轮廓边框位置信息依次确定所述历史轮廓边框信息与当前轮廓边框信息库中各当前轮廓边框信息的重合度,包括:根据如下公式确定所述重合度:其中,和分别表示历史轮廓边框信息的矩形边界框左上角位置信息和右下角位置信息,和分别表示当前轮廓边框信息的矩形边界框左上角位置信息和右下角位置信息。8.根据权利要求4所述的方法,其特征在于,在确定所述目标当前轮廓边框信息对应的待检测目标为异物之后,所述方法还包括:根据所述目标当前轮廓边框信息中的所述轮廓边框位置信息确定所述异物的位置信息。9.根据权利要求8所述的方法,其特征在于,所述轮廓边框位置信息为最小外接矩形边界框信息;相应的,根据所述目标当前轮廓边框信息中的所述轮廓边框位置信息确定所述异物的位置信息,包括:根据如下公式确定所述异物的位置信息:其中,(x,y)表示异物的位置信息,(r,c)表示最小外接矩形边界框的中心位置信息,(r
tl
,c
tl
)和(r
br
,c
br
)分别表示所述最小外接矩形边界框信息的左上角位置信息和右下角位置信息,δ表示当前雷达图像中像素点和实际区域的对应关系,p、q分别表示当前雷达图像的行数和列数。10.根据权利要求1所述的方法,其特征在于,根据所述当前雷达图像得到当前轮廓边框信息库,包括:对所述当前雷达图像中背景与前景进行分离得到背景去除后的目标雷达图像;确定所述目标雷达图像中前景中包括的待检测目标区域的位置信息;根据待检测目标区域的位置信息确定所述待检测目标区域的最小外接矩形边界框信息为当前轮廓边框信息;根据所述目标雷达图像中所有待检测目标区域的当前轮廓边框信息构建当前轮廓边框信息库。11.根据权利要求10所述的方法,其特征在于,对所述当前雷达图像中背景与前景进行分离得到背景去除后的目标雷达图像,包括:确定采集当前雷达图像之前在雷达检测区域采集的预设数量的上一雷达图像;所述上一雷达图像包括在采集当前雷达图像之前邻近时间内采集的雷达图像或者对雷达检测区
域进行封闭所采集的雷达图像;对预设数量的上一雷达图像进行图像累加平均,得到上一雷达图像对应的累加平均图像;依据累加平均图像对当前雷达图像中背景与前景进行分离得到背景去除后的目标雷达图像。12.根据权利要求11所述的方法,其特征在于,依据累加平均图像对当前雷达图像中背景与前景进行分离得到背景去除后的目标雷达图像,包括:将当前雷达图像与上一雷达图像的累加平均图像进行图像差值处理,得到图像差值处理后图像;通过对图像差值处理后图像进行二值化处理,对当前雷达图像中背景与前景进行分离得到背景去除后的目标雷达图像。13.根据权利要求10所述的方法,其特征在于,确定所述目标雷达图像中前景中包括的待检测目标区域的位置信息,包括:对所述目标雷达图像进行形态学处理得到处理后雷达图像;目标雷达图像的前景中待检测目标区域介于发生前景与背景分离而被分割到不同子区域;对处理后的雷达图像进行高斯平滑处理,并对高斯平滑后的处理后雷达图像进行边缘检测得到所述目标雷达图像的边缘检测图;对所述边缘检测图进行外边界拐点提取,得到所述目标雷达图像的前景中待检测目标区域的外边界拐点位置信息,作为所述待检测目标区域的位置信息。14.一种基于雷达图的地面异物检测装置,其特征在于,包括:图像确定模块,用于获取雷达检测区域的当前雷达图像;信息库确定模块,用于根据所述当前雷达图像得到当前轮廓边框信息库;其中,所述当前轮廓边框信息库中包括至少一条待检测目标的当前轮廓边框信息;检测模块,用于根据所述待检测目标的当前轮廓边框信息和历史轮廓边框信息库对所述待检测目标进行异物检测;其中,所述历史轮廓边框信息库根据所述历史雷达图像进行确定。15.一种电子设备,其特征在于,所述电子设备包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-13中任一项所述的基于雷达图的地面异物检测方法。16.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-13中任一项所述的基于雷达图的地面异物检测方法。
技术总结
本发明公开了一种基于雷达图的地面异物检测方法、装置、设备和介质。所述方法包括:获取雷达检测区域的当前雷达图像;根据所述当前雷达图像得到当前轮廓边框信息库;其中,所述当前轮廓边框信息库中包括至少一条待检测目标的当前轮廓边框信息;根据所述待检测目标的当前轮廓边框信息和历史轮廓边框信息库对所述待检测目标进行异物检测;其中,所述历史轮廓边框信息库根据所述历史雷达图像进行确定。本申请技术方案通过对当前雷达图像分析处理后,可获得准确的当前轮廓边框信息库,再将待检测目标的当前轮廓边框信息和历史轮廓边框信息库进行比对,以实现准确快速的检测出待检测目标是否为异物。测目标是否为异物。测目标是否为异物。
技术研发人员:张军 陶征 许孝勇 顾超 章庆 朱大安 仇世豪 王长冬 张辉
受保护的技术使用者:南京慧尔视智能科技有限公司
技术研发日:2022.08.31
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。