技术特征:
1.一种新的路侧视角下目标检测系统,其特征在于,包括:数据获取模块、模型构建模块及损失函数模块;所述数据获取模块用于获取路侧图像数据集与训练数据集;所述模型构建模块包括信息提取模块、信息融合模块,所述信息融合模块用于将所述特征信息进行融合;所述信息提取模块用于提取路侧图像数据集与训练数据集中的特征信息。2.根据权利要求1所述的新的路侧视角下目标检测系统,其特征在于,所述信息提取模块包括:特征提取模块、注意力模块;其中,所述注意力模块用于位置信息嵌入和坐标信息特征图生成,增强特征中的重要通道和空间特征信息;所述特征提取模块由yolov5s算法模型的主干网络特征提取模块去除顶层特征提取层得到,用于提取特征信息。3.根据权利要求1所述的新的路侧视角下目标检测系统,其特征在于,所述信息融合模块采用广义特征金字塔网络结构,跨尺度特征融合方法对特征信息进行融合,其中,所述跨尺度特征融合方法包括两种方式:各尺度的节点同时对其上一个、斜上方以及斜下方三个节点进行特征融合、对前一层与当前层的特征进行融合并建立跳层连接。4.根据权利要求1所述的新的路侧视角下目标检测系统,其特征在于,所述损失函数模块包括:eiouloss与focalloss,其中所述eiouloss包括重叠损失、中心距损失、宽高损失,所述eiouloss用于优化收敛速度和回归精度,所述focalloss用于优化边界框回归任务中的样本不平衡问题。5.根据权利要求4所述的新的路侧视角下目标检测系统,其特征在于,所述宽高损失用于使目标盒与锚盒的宽度和高度之差最小,优化收敛速度。6.根据权利要求3所述的新的路侧视角下目标检测系统,其特征在于,所述信息融合模块采取从底层特征提取层开始进行特征融合的方式进行信息融合。7.一种新的路侧视角下目标检测方法,其特征在于,包括以下步骤:获取数据集;构建路侧图像检测改进模型;基于所述数据集对所述路侧图像检测改进模型进行训练和评价;获取路侧图像;将所述路侧图像输入至训练后的路侧图像检测改进模型进行识别,实现路侧视角下的目标检测。8.根据权利要求7所述的新的路侧视角下目标检测方法,其特征在于,基于照明条件、天气情况、道路场景、相机规格将所述数据集划分为不同的子数据集,并分为训练集和验证集。
技术总结
本发明公开了一种新的路侧视角下目标检测系统及方法,包括:获取数据集;构建路侧图像检测改进模型;基于所述数据集对所述路侧图像检测改进模型进行训练和评价;获取路侧图像;将所述路侧图像输入至训练后的路侧图像检测改进模型进行识别,实现路侧视角下的目标检测。本发明在YOLOv5s的基础上重构了特征融合模块,使其能够更加有效的捕捉小目标信息,提高了小目标特征提取能力;其次引入了GFPN进行多尺度特征融合,提高了不同分辨率特征信息的融合效率;另外引入了CA模块,提高了模型的鲁棒性;最后替换Focal-EIOU Loss为算法模型的损失函数,在提高边界框回归速度的同时提高定位速度。位速度。位速度。
技术研发人员:黄文准 黄磊 石钏 赵正阳
受保护的技术使用者:西京学院
技术研发日:2022.08.15
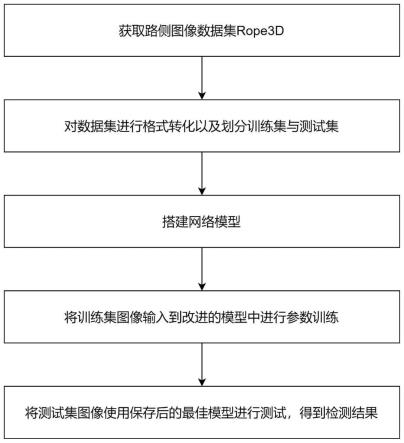
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。