技术特征:
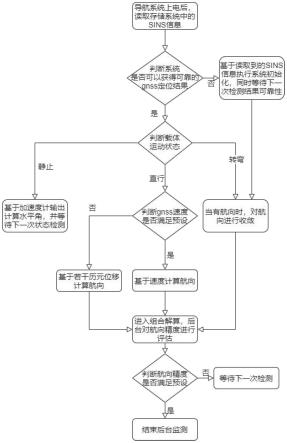
1.一种用于低速场景的航向快速初始化方法,其特征在于,包括以下步骤:获取捷联惯性导航系统参数,并在所述捷联惯性导航系统参数满足预设条件时,进入惯性导航解算模式;在gnss定位结果可靠时,判断导航系统当前所处的运动状态;当所述导航系统当前所处的运动状态为静止状态时,根据加速度计输出计算姿态水平角;当所述导航系统当前所处的运动状态为转弯状态时,根据已得到的航向角信息对航向角进行收敛;当所述导航系统当前所处的运动状态为直行状态时,进入航向对准阶段;所述航向对准阶段中,判断gnss的速度信息是否达到预设标准,当达到预设标准时,使用gnss的速度信息计算航向角及不确定度;否则,基于若干历元位移计算航向角及不确定度。2.根据权利要求1所述的用于低速场景的航向快速初始化方法,其特征在于,当gnss定位结果不可靠时,基于所述捷联惯性导航系统参数进行航向初始化。3.根据权利要求1所述的用于低速场景的航向快速初始化方法,其特征在于,所述在gnss定位结果可靠时,判断导航系统当前所处的运动状态具体为:通过窗口时间内若干组加速度计的输出计算标准差,并根据所述标准差判断所述导航系统是否处于静止状态;当所述导航系统不处于静止状态时,通过窗口时间内陀螺输出计算角度变化率,并根据所述角度变化率判断所述导航系统是否处于转弯状态。4.根据权利要求1所述的用于低速场景的航向快速初始化方法,其特征在于,所述根据加速度计输出计算姿态水平角的计算公式为:其中,θ为俯仰角,γ为横滚角,和分别为加速度计x轴、y轴和z轴输出;g为重力加速度矢量在导航坐标系n系的z轴上的分量。5.根据权利要求1所述的用于低速场景的航向快速初始化方法,其特征在于,所述使用gnss的速度信息计算航向角及不确定度的计算公式为:其中,为航向角,为gnss的东向速度结果,为gnss的北向速度结果,为gnss的东向速度结果的标准差,为gnss的北向速度结果的标准差。6.根据权利要求1所述的用于低速场景的航向快速初始化方法,其特征在于,所述基于若干历元位移计算航向角及不确定度的计算公式为:
其中,为航向角,为n个历元gnss的位移东向分量之和,为n个历元gnss的位移北向分量之和,为第i个历元gnss的东向位置结果标准差,为第i个历元gnss的北向位置结果标准差。7.根据权利要求1所述的用于低速场景的航向快速初始化方法,其特征在于,还包括航向角检测模式,具体为:判断航向角是否达到稳定状态,当航向角未达到稳定状态是,对航向角进行持续检测,持续检测时采用三种独立的策略,分别为:gnss速度计算航向角、位移矢量计算航向角和大航向失准角策略计算航向角,所述三种独立的策略的权值随载体速度和运动状态变化进行动态调整,当三种独立的策略综合判断的航向角达到稳定状态时,调整航向信息,结束对航向角的检测。8.根据权利要求7所述的用于低速场景的航向快速初始化方法,其特征在于,当捷联惯性导航系统参数满足保存条件时,将所述捷联惯性导航系统参数进行保存,以便所述导航系统在下次上电时读取信息。9.一种导航系统,其特征在于,包括处理器、存储器以及计算机程序,所述计算机程序被存储在所述存储器中,并且被配置成由所述处理器执行,所述计算机程序包括用于执行如权利要求1-8中任一所述的用于低速场景的航向快速初始化方法。
技术总结
本发明涉及一种用于低速场景的航向快速初始化方法和导航系统,其中,方法包括:获取捷联惯性导航系统参数,并在所述捷联惯性导航系统参数满足预设条件时,进入惯性导航解算模式;在GNSS定位结果可靠时,判断导航系统当前所处的运动状态,并根据导航系统所处运动状态选择不同的策略确定初始航向角,执行系统初始化;并在航向角未达到稳定状态前,持续进行后台航向角监测。本发明能够缩短GNSS/SINS组合导航系统初始化时间,同时提高航向对准精度。同时提高航向对准精度。同时提高航向对准精度。
技术研发人员:胡昊杰 曹宇轩
受保护的技术使用者:芯与物(上海)技术有限公司
技术研发日:2022.07.27
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。