技术特征:
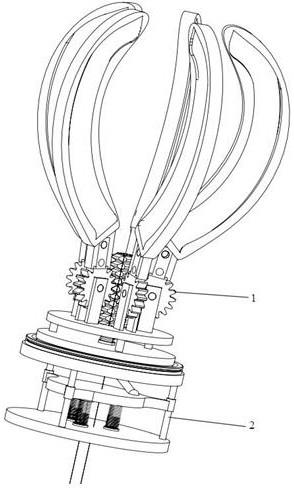
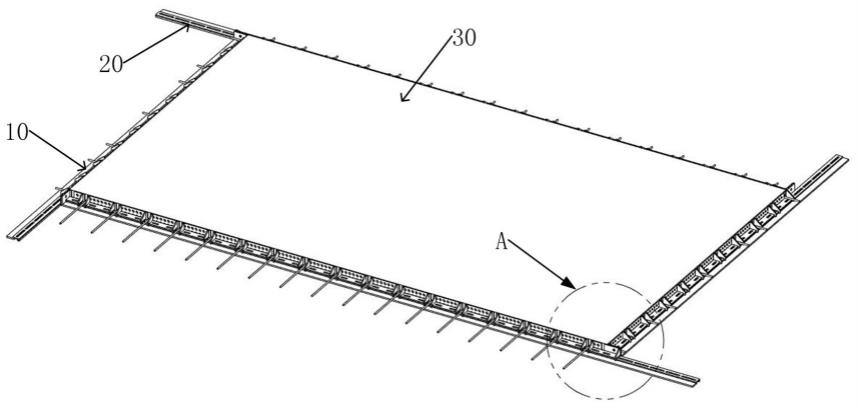
1.一种绳驱采摘机械手,包括夹持机构(1)和底座旋转机构(2),其特征在于:所述的夹持机构(1)包括夹持手指(11)、tpu手指外套(12)、多边齿条(13)、齿轮(14)、连接座(15)、复位弹簧(16)、底座(17)及第一拉绳(18);夹持手指(11)间隔并呈圆周状分布设置在底座旋转机构(2)上,夹持手指(11)的底端设置在齿轮(14)上,所述的齿轮(14)安装在连接座(15)上的手指安装轴上,齿轮(14)手指安装轴与以转动副的方式连接,齿轮(14)与连接座(15)中心设置多边齿条(13)啮合,多边齿条(13)的齿面的数量与齿轮的数量相应,多边齿条(13)内部设有导向轨道;连接座(15)通过立柱(19)与底座(17)固定连接;导向柱(10)的一端固定在底座(17)上,导向柱(10)另一端向上穿过多边齿条(13)内部的导向轨道,导向柱(10)与导向轨道配合,使多边齿条(13)受驱动沿导向柱(10)上下运动;复位弹簧(16)套接在导向柱(10)上,复位弹簧(16)的一端固定在底座(17)上,复位弹簧(16)另一端固定在多边齿条(13)的底端,第一拉绳(18)的顶端连接在多边齿条(13)的底端;所述的底座旋转机构(2)包括轴承(21)、轴承盘(22)、机架柱(23)、滑块盘(24)、拉力弹簧(25)、机架座(26)、第二拉绳(27)、曲柄(28);夹持机构(1)通过底座(17)固定在轴承(21)的内圈上;轴承(21)的外圈固定在轴承盘(22)上;机架柱(23)沿轴承盘(22)的周向间隔设置,机架柱(23)一端固定在轴承盘(22)上,机架柱(23)的另一端固定在机架座(26)上;滑块盘(24)通过滑套活动连接在机架柱(23)上,滑块盘(24)受驱动沿机架柱(23)上下滑动;曲柄(28)一端与滑块盘(24)上的球形槽(241)活动连接,另一端与底座(17)上的球形槽活动连接,底座(17)上的球形槽与滑块盘(24)上的球形槽(241)结构相同;拉力弹簧(25)设有3个,间隔120度呈圆周分布,拉力弹簧(25)的一端固定在滑块盘(24)的底端,拉力弹簧(25)的另一端固定在机架座(26)上;第二拉绳(27)的顶端连接在滑块盘(24)的底端。2.根据权利要求1所述的绳驱采摘机械手,其特征在于:所述的夹持手指(11)设置5个,5个夹持手指(11)等间隔设置,相应地多边齿条(13)是由5个齿条安装在5边体的5个相邻面上,导向柱(10)与多边齿条(13)设有的导向轨道的截面形状相同,且导向柱(10)与导向轨道之间设有运动间隙。3.根据权利要求1所述的绳驱采摘机械手,其特征在于:所述的立柱(19)设有3个,连接座(15)、底座(17)上均设有立柱固定孔。4.根据权利要求1所述的绳驱采摘机械手,其特征在于:所述的夹持手指(11)套有tpu手指外套(12);tpu手指外套(12)所用材料为tpu材料。5.根据权利要求1所述的绳驱采摘机械手,其特征在于:所述的机架柱(23)设有3个,轴承盘(22)和机架座(26)上相应位置设有机架柱固定孔。6.根据权利要求1所述的绳驱采摘机械手,其特征在于:所述的多边齿条(13)、底座(17)上相应位置均设置复位弹簧固定槽,复位弹簧(16)两端连接设置在复位弹簧固定槽内。7.根据权利要求1所述的绳驱采摘机械手,其特征在于:所述的滑块盘(24)、机架座(26)上相应位置均设置拉力弹簧固定槽,拉力弹簧(25)的两端设置在拉力弹簧固定槽内。8.根据权利要求1所述的绳驱采摘机械手,其特征在于:所述的夹持机构(1)外侧套装夹持机构保护罩(31)用于防护,所述的底座旋转机构(2)外侧套装底座旋转机构保护罩(32)用于防护。9.根据权利要求1所述的绳驱采摘机械手,其特征在于:所述的连接座(15)的中心设置
多边形孔,便于使多边齿条(13)穿过;底座(17)、轴承盘(22)、滑块盘(24)、机架座(26)上在中心位置的旁侧均设置第一圆形绳孔,便于使第一拉绳(18)穿过;机架座(26)在中心位置的旁侧设置第二圆形绳孔,便于使第二拉绳(27)穿过。
技术总结
本实用新型公开了一种绳驱采摘机械手,包括机械手机构,所述的机械手机构包括夹持机构和底座旋转机构,所述的底座旋转机构作为安装基础连接设置夹持机构。所述的夹持手指设有5个,夹持手指外套有tpu手指外套,夹持手指固装在齿轮上,所述的齿轮安装在连接座上,所述的连接座通过立柱与底座进行连接,所述的导向柱一端固定在底座上,导向柱穿过多边齿条内部的导向轨道。所述的底座、轴承、轴承盘、滑块盘、机架座平行设置,其中轴承盘和机架座通过机架柱进行连接,所述的曲柄设置在滑块盘和底座之间,滑块盘可以在轴承盘和机架座之间上下滑动,拉动两根拉绳可以实现绳驱机械手对目标果实的夹持和旋转动作。本实用新型用于农业机械技术领域。技术领域。技术领域。
技术研发人员:黄保赛 张伟涛 赵栋杰 吴越 包新棉
受保护的技术使用者:聊城大学
技术研发日:2022.08.08
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。