技术特征:
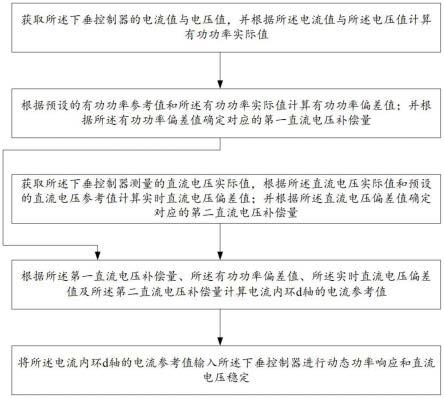
1.一种柔性直流牵引供电系统下垂控制器的控制方法,其特征在于,包括:获取所述下垂控制器的电流值与电压值,并根据所述电流值与所述电压值计算有功功率实际值;根据预设的有功功率参考值和所述有功功率实际值计算有功功率偏差值;并根据所述有功功率偏差值确定对应的第一直流电压补偿量;获取所述下垂控制器测量的直流电压实际值,根据所述直流电压实际值和预设的直流电压参考值计算实时直流电压偏差值;并根据所述直流电压偏差值确定对应的第二直流电压补偿量;根据所述第一直流电压补偿量、所述有功功率偏差值、所述实时直流电压偏差值及所述第二直流电压补偿量计算电流内环d轴的电流参考值;将所述电流内环d轴的电流参考值输入所述下垂控制器进行动态功率响应和直流电压稳定。2.如权利要求1所述的方法,其特征在于,所述根据预设的有功功率参考值和所述有功功率实际值计算有功功率偏差值,具体包括:计算所述有功功率参考值与所述有功功率实际值之间的差值,作为有功功率偏差值。3.如权利要求2所述的方法,其特征在于,所述根据所述有功功率偏差值确定对应的第一直流电压补偿量,具体包括:将所述有功功率偏差值乘以预设的直流电压补偿系数的结果,输出为对应的第一直流电压补偿量。4.如权利要求1所述的方法,其特征在于,所述根据所述直流电压实际值和预设的直流电压参考值计算实时直流电压偏差值,具体包括:计算所述直流电压实际值与所述直流电压参考值之间的差值,作为实时直流电压偏差值。5.如权利要求4所述的方法,其特征在于,所述根据所述直流电压偏差值确定对应的第二直流电压补偿量,具体包括:将所述直流电压偏差值乘以预设的补偿系数的结果,输出为对应的第二直流电压补偿量。6.如权利要求1所述的方法,其特征在于,所述根据所述第一直流电压补偿量、所述有功功率偏差值、所述实时直流电压偏差值及所述第二直流电压补偿量计算电流内环d轴的电流参考值,具体包括:根据所述第一直流电压补偿量、所述有功功率偏差值、所述实时直流电压偏差值及所述第二直流电压补偿量计算对应的下垂调节参数;将所述下垂调节参数输入预设的pi控制器,得到电流内环d轴的电流参考值。7.如权利要求6所述的方法,其特征在于,根据以下公式计算对应的下垂调节参数:k
droop
={[u
dc-u
dcref
g
vdc
u
dc
g
p
(p-p
ref
)]}/(p
ref-p)其中,k
droop
表示所述下垂控制器的下垂调节参数,p
ref
表示所述下垂控制器预先设定的有功功率参考值,p表示所述下垂控制器的有功功率实际值,u
dcref
表示所述下垂控制器预先设定的直流电压参考值,u
dc
表示下垂控制器的直流电压实际值,g
vdc
表示预设的补偿系数,g
p
表示直流电压补偿系数。
8.一种柔性直流牵引供电系统下垂控制器的控制系统,用以实现如权利要求1-7任一项所述的方法,其特征在于,包括:第一直流电压补偿模块,用以获取所述下垂控制器的电流值与电压值,并根据所述电流值与所述电压值计算有功功率实际值;根据预设的有功功率参考值和所述有功功率实际值计算有功功率偏差值;并根据所述有功功率偏差值确定对应的第一直流电压补偿量;第二直流电压补偿模块,用以获取所述下垂控制器测量的直流电压实际值,根据所述直流电压实际值和预设的直流电压参考值计算实时直流电压偏差值;并根据所述直流电压偏差值确定对应的第二直流电压补偿量;pi控制器,用以根据所述第一直流电压补偿量、所述有功功率偏差值、所述实时直流电压偏差值及所述第二直流电压补偿量计算电流内环d轴的电流参考值;并将所述电流内环d轴的电流参考值输入所述下垂控制器进行动态功率响应和直流电压稳定。9.如权利要求8所述的系统,其特征在于,还包括:所述第一直流电压补偿模块,具有用于计算所述有功功率参考值与所述有功功率实际值之间的差值,作为有功功率偏差值;将所述有功功率偏差值乘以预设的直流电压补偿系数的结果,输出为对应的第一直流电压补偿量;所述第二直流电压补偿模块,具体用于计算所述直流电压实际值与所述直流电压参考值之间的差值,作为实时直流电压偏差值;将所述直流电压偏差值乘以预设的补偿系数的结果,输出为对应的第二直流电压补偿量。10.如权利要求8所述的系统,其特征在于,所述pi控制器,具体用于根据所述第一直流电压补偿量、所述有功功率偏差值、所述实时直流电压偏差值及所述第二直流电压补偿量计算对应的下垂调节参数;将所述下垂调节参数输入预设的pi控制器,得到电流内环d轴的电流参考值;其中,根据以下公式计算对应的下垂调节参数:k
droop
={[u
dc-u
dcref
g
vdc
u
dc
g
p
(p-p
ref
)]}/(p
ref-p)其中,k
droop
表示所述下垂控制器的下垂调节参数,p
ref
表示所述下垂控制器预先设定的有功功率参考值,p表示所述下垂控制器的有功功率实际值,u
dcref
表示所述下垂控制器预先设定的直流电压参考值,u
dc
表示下垂控制器的直流电压实际值,g
vdc
表示预设的补偿系数,g
p
表示直流电压补偿系数。
技术总结
本发明提供一种柔性直流牵引供电系统下垂控制器的控制方法及系统,包括,获取所述下垂控制器的电流值与电压值并计算有功功率实际值;根据预设的有功功率参考值和所述有功功率实际值计算有功功率偏差值;确定第一直流电压补偿量;根据所述直流电压实际值和预设的直流电压参考值计算实时直流电压偏差值;并确定第二直流电压补偿量;根据所述第一直流电压补偿量、所述有功功率偏差值、所述实时直流电压偏差值及所述第二直流电压补偿量计算电流内环d轴的电流参考值;输入所述下垂控制器进行动态功率响应和直流电压稳定。本发明降低了直流系统电压偏差,提高了系统暂态和稳态性能,有效推进基于模块化多电平换流器的直流系统与牵引供电系统的结合。与牵引供电系统的结合。与牵引供电系统的结合。
技术研发人员:刘国伟 赵宇明 郭佩乾 袁志昌
受保护的技术使用者:深圳供电局有限公司
技术研发日:2022.08.24
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。