技术特征:
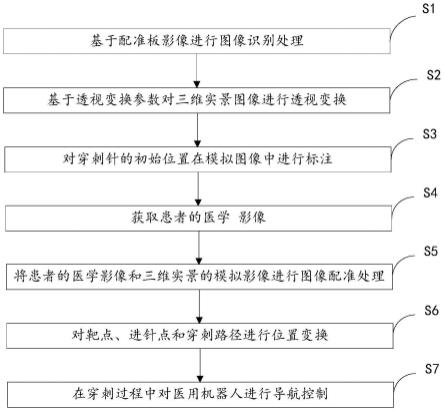
1.一种穿刺路径的机器人导航控制方法,应用于电子设备,用于对介入手术室内医疗机器人进行导航控制,所述介入手术室配置有医学影像设备和影像采集设备,所述医疗机器人的穿刺针处于一个垂直于所述医学影像设备的检查床的穿刺平面上,其特征在于,所述机器人导航控制方法包括步骤:基于所述影像采集设备所采集的位于所述穿刺平面上的配准板的配准板影像进行图像识别,得到透视变换参数;基于所述透视变换参数对所述影像采集设备所采集的三维实景图像进行透视变换,得到所述三维实景图像的模拟图像;将所述医疗机器人夹持的穿刺针的初始位置在所述模拟图像中进行标注,得到所述穿刺针的当前位置;获取位于所述检查床上患者的医学影像,所述医学影像上至少标注有靶点、进针点和穿刺路径;将所述医学影像与所述模拟图像进行配准处理,得到所述医疗机器人的机器人坐标系与所述医学影像之间的坐标变换关系;基于所述坐标变换关系对所述当前位置、所述靶点、所述进针点和所述穿刺路径进行坐标变换,得到基于所述机器人坐标系的当前位置坐标、靶点坐标、进针点坐标和穿刺路径坐标;在所述医疗机器人对患者进行穿刺过程中,基于所述当前位置坐标、所述靶点坐标、所述进针点坐标和所述穿刺路径坐标对所述医用机器人进行导航控制。2.如权利要求1所述的机器人导航控制方法,其特征在于,所述医学影像包括ct影像、mri影像和pet-ct影像中的部分、全部或融合图像。3.如权利要求1所述的导航控制方法,其特征在于,所述基于所述靶点坐标、所述进针点坐标和所述穿刺路径坐标对所述医用机器人进行导航控制,包括步骤:对所述靶点坐标、所述进针点坐标和所述穿刺路径坐标进行解算,得到所述穿刺针到达所述进针点的进针路径、持针角度姿态和最大穿刺深度;基于所述穿刺针的当前位置、所述进针路径、所述持针角度姿态和最大穿刺深度对所述医疗机器人进行控制。4.一种机器人导航控制装置,应用于电子设备,用于对介入手术室内医疗机器人进行导航控制,所述介入手术室配置有医学影像设备和影像采集设备,所述医疗机器人的穿刺针处于一个垂直于所述医学影像设备的检查床的穿刺平面上,其特征在于,所述机器人导航控制装置包括:图像识别模块,被配置为基于所述影像采集设备所采集的位于所述穿刺平面上的配准板的配准板影像进行图像识别,得到透视变换参数;图像变换模块,被配置为基于所述透视变换参数对所述影像采集设备所采集的三维实景图像进行透视变换,得到所述三维实景图像的模拟图像;位置标注模块,被配置为将所述医疗机器人夹持的穿刺针的初始位置在所述模拟图像中进行标注,得到所述穿刺针的当前位置;影像获取模块,被配置为获取位于所述检查床上患者的医学影像,所述医学影像上至少标注有靶点、进针点和穿刺路径;
图像配准模块,被配置为将所述医学影像与所述模拟图像进行配准处理,得到所述医疗机器人的机器人坐标系与所述医学影像之间的坐标变换关系;坐标变换模块,被配置为基于所述坐标变换关系对所述当前位置、所述靶点、所述进针点和所述穿刺路径进行坐标变换,得到基于所述机器人坐标系的当前位置坐标、靶点坐标、进针点坐标和穿刺路径坐标;导航执行模块,被配置为在所述医疗机器人对患者进行穿刺过程中,基于所述当前位置坐标、所述靶点坐标、所述进针点坐标和所述穿刺路径坐标对所述医用机器人进行导航控制。5.如权利要求4所述的导航控制装置,其特征在于,所述医学影像包括ct影像、mri影像和pet-ct影像中的部分、全部或融合图像。6.如权利要求4所述的导航控制装置,其特征在于,所述导航执行模块包括:数据解算单元,用于对所述靶点坐标、所述进针点坐标和所述穿刺路径坐标进行解算,得到所述穿刺针到达所述进针点的进针路径、持针角度姿态和最大穿刺深度;穿刺控制单元,用于基于所述穿刺针的当前位置、所述进针路径、所述持针角度姿态和最大穿刺深度对所述医疗机器人进行控制。7.一种电子设备,其特征在于,包括至少一个处理器和与所述处理器连接的存储器,其中:所述存储器用于存储计算机程序或指令;所述处理器用于执行所述计算机程序或指令,以使所述电子设备能够实施如权利要求1~3任一项所述的机器人导航控制方法。8.一种存储介质,应用于电子设备,其特征在于,所述存储介质用于承载一个或多个计算机程序,以使所述一个或多个计算机程序被所述电子设备执行时,能够使得所述电子设备实现权利要求1~3任一项所述的机器人导航控制方法。
技术总结
本申请公开了一种机器人导航控制方法、装置、电子设备和存储介质,该方法和装置具体为基于穿刺平面上配准板影像进行图像识别,得到透视变换参数;基于透视变换参数对三维实景图像进行透视变换,得到模拟图像;基于该模拟图像将机器人夹持的穿刺针的初始位置在模拟图像中标注出来;获取位于检查床上患者的医学影像;将医学影像和模拟影像进行图像配准处理,得到机器人坐标系相对于医学影像之间的坐标变换关系;基于坐标变换关系将医学影像上的靶点、进针点和穿刺路径变换为基于机器人坐标系的靶点坐标、进针点坐标和穿刺路径坐标等多个参数;并基于前述多个参数进行导航控制。本方案由于基于医学影像与三维实景进行配准,从而提高了定位精度。提高了定位精度。提高了定位精度。
技术研发人员:王宁 谷野 王枫 王苑铮 张颖
受保护的技术使用者:沈阳爱健网络科技有限公司
技术研发日:2022.08.23
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。