技术特征:
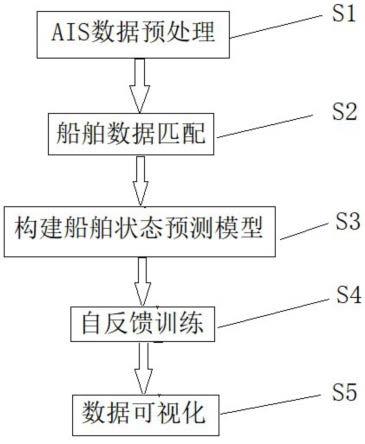
1.一种面向两船舶航行状态多步预测的深度学习方法,其特征在于,包括:步骤s1:获取船舶自动识别系统原始数据,对所述船舶自动识别系统原始数据进行预处理,得到预处理后的数据;步骤s2:根据所述预处理后的数据,按照时间匹配船舶自动识别系统数据序列对,计算所述数据序列对的加权潜在风险值之和,保留当前潜在风险最大的船舶序列数据对,得到船舶序列数据对集合;步骤s3:根据所述船舶序列数据对集合,构建船舶航行状态预测网络模型,以预测船舶未来状态;步骤s4:根据所述船舶航行状态预测网络模型,计算所述船舶航行状态预测网络模型输出值与真实值之间的误差,动态调整所述船舶航行状态预测模型的学习率,得到预测结果;步骤s5:将所述预测结果实现数据可视化。2.如权利要求1所述的面向两船舶航行状态多步预测的深度学习方法,其特征在于,在所述步骤s1中,对所述船舶自动识别系统原始数据进行预处理包括:步骤s1.1:对于获取的所述船舶自动识别系统原始数据,确定其数据类型和调整其数据格式,并通过二分查找算法初步提取数据;步骤s1.2:根据航道约束边界与拉依达准则,将所述初步提取数据进一步的细化数据范围并剔除异常数据,得到缺失数据;步骤s1.3:通过分段三次样条插值,补全所述缺失数据,得到所述预处理后的数据。3.如权利要求2所述的面向两船舶航行状态多步预测的深度学习方法,其特征在于,在所述步骤s1.1中,所述通过二分查找算法初步提取数据具体包括:根据船舶航行状态预测所涉及的地理范围,从所述船舶自动识别系统原始数据中提取所涉及的地理范围内的船舶航行状态序列数据。4.如权利要求1所述的面向两船舶航行状态多步预测的深度学习方法,其特征在于,在所述步骤s2中,所述按照时间匹配船舶自动识别系统数据序列对包括:基于所述预处理后的数据,提取满足时间条件的船舶数据矩阵集合,根据所述船舶自动识别系统数据序列对,匹配对应的数据矩阵。5.如权利要求4所述的面向两船舶航行状态多步预测的深度学习方法,其特征在于,所述提取满足时间条件的船舶数据矩阵集合中时间t的限定条件为:t
o-t
m
≤t≤t
o
t
n-1式中:t
m
为预测所需历史数据的时间长度,t
o
为预测的起始时刻,t
n
为预测未来数据的时间长度。6.如权利要求5所述的面向两船舶航行状态多步预测的深度学习方法,其特征在于,在所述步骤s2中,计算所述数据序列对的加权潜在风险值之和包括:提取所述船舶自动识别系统数据序列对中的经纬度信息、航行信息和船长信息,计算两船舶从t=t
o-t
m
时刻至t=t
o-1时刻的潜在风险值。7.如权利要求6所述的面向两船舶航行状态多步预测的深度学习方法,其特征在于,在所述步骤s2中,所述保留当前潜在风险最大的船舶序列数据对具体为:
若所述的两船舶从t=t
o-t
m
时刻至t=t
o-1时刻的潜在风险值不大于当前预设的最大值,则剔除当前对应的船舶序列数据对;若所述的两船舶从t=t
o-t
m
时刻至t=t
o-1时刻的潜在风险值大于当前预设的最大值,则更新所述最大值,并保留当前对应的船舶序列数据对。8.如权利要求1所述的面向两船舶航行状态多步预测的深度学习方法,其特征在于,在所述步骤s3中,所述船舶航行状态预测网络模型由编码器、交互模块和解码器组成,所述编码器为两个具有相同lstm单元的子编码器,以用于获取船舶历史数据信息;所述交互模块用于融合船舶间的运动信息;所述解码器为两个独立于所述编码器的具有相同lstm单元的子解码器,以用于预测船舶未来状态。9.如权利要求1所述的面向两船舶航行状态多步预测的深度学习方法,其特征在于,在步骤s4中,计算所述船舶航行状态预测网络模型输出值与真实值之间的误差包括:步骤s4.1:通过最大最小值归一化将所述船舶序列数据对集合中的任一船舶序列数据映射到[0,1]范围内;步骤s4.2:根据所述船舶序列数据对集合获取训练数据,输入所述训练数据至所述船舶航行状态预测网络模型,计算得到所述船舶航行状态预测网络模型的输出值和所述船舶航行状态预测网络模型的真实值,计算所述输出值与所述真实值之间的误差;步骤s4.3:对所述误差的结果进行判定,根据所述判定结果动态调整所述船舶航行状态预测网络模型的学习率,得到所述预测结果。10.如权利要求1所述的面向两船舶航行状态多步预测的深度学习方法,其特征在于,在所述步骤s5中,将所述预测结果实现数据可视化,其具体为:将所述预测结果通过python的matplotlib工具包进行展示,以实现所述预测结果的可视化。
技术总结
本发明公开了一种面向两船舶航行状态多步预测的深度学习方法,包括:根据AIS数据特征,从海量数据中快速提取、筛选、插值出有效的船舶数据,根据船舶潜在风险公式,获取同一时空范围内潜在风险最大的船舶序列数据对,构建船舶航行状态预测模型,通过交互模块有效连接编码器与解码器,并实现船舶历史数据信息间互通,当模型训练时,依据计算的损失值进行自反馈调节,帮助模型快速收敛。本发明通过结合船舶潜在风险领域与长短期记忆网络模型,实现两船舶航行状态的多步预测,克服了单船舶模型预测忽略周围船舶影响的局限性并对多船舶模型数据的选择提供了理论依据。数据的选择提供了理论依据。数据的选择提供了理论依据。
技术研发人员:刘涛 徐翔 雷正玲 霍宇驰 孟威 高进
受保护的技术使用者:上海海事大学
技术研发日:2022.07.05
技术公布日:2022/10/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。